








News









































ความลับเบื้องหลังการเร่งความเร็วทันทีของ EVS: ภายในตรรกะการควบคุม MCU
ยานพาหนะไฟฟ้า (EVs) ได้กลายเป็นคำพ้องความหมายกับการเร่งความเร็วที่น่าตื่นเต้นและเงียบ แตะเหยียบและคุณจะก้าวไปข้างหน้าด้วยความรู้สึกฉุนเฉียวที่แม้แต่รถยนต์ก๊าซที่มีประสิทธิภาพก็ยังดิ้นรนเพื่อจับคู่ แต่สิ่งที่สร้างความรู้สึกของพลังทันทีนี้? คำตอบนั้นอยู่ลึกเข้าไปในอุปกรณ์อิเล็กทรอนิกส์ของยานพาหนะโดยเฉพาะในระบบขนาดเล็ก แต่ทรงพลังที่รู้จักกันในชื่อชุดควบคุมมอเตอร์ (MCU) บล็อกนี้จะนำคุณภายใต้ฮูดเพื่อสำรวจบทบาทที่สำคัญของตรรกะการควบคุม MCU และวิธีการแปลความตั้งใจของไดรเวอร์ให้เป็นแรงบิดที่ราบรื่นและการเร่งความเร็วที่ทำให้ดีอกดีใจ
ทำไม EVs ถึงรู้สึกเร็วมากจากการหยุดนิ่ง?
หากคุณเคยขับรถหรือนั่งในยานพาหนะไฟฟ้าหนึ่งในสิ่งแรกที่คุณสังเกตเห็นคือการเร่งความเร็วอย่างรวดเร็วจากศูนย์ ไม่ว่าจะเป็น Tesla Model 3, ปลาโลมา BYD หรือแม้แต่รถยนต์ EV City ขนาดกะทัดรัดการตอบสนองก็น่าแปลกใจ "การเร่งความเร็วสแน็ป" นี้ไม่ได้เป็นเพียงกลไก-มันเป็นความมหัศจรรย์ทางวิศวกรรมที่เกิดจากระบบขับเคลื่อนไฟฟ้าและการตัดสินใจแบบเรียลไทม์ของ MCU ของยานพาหนะ
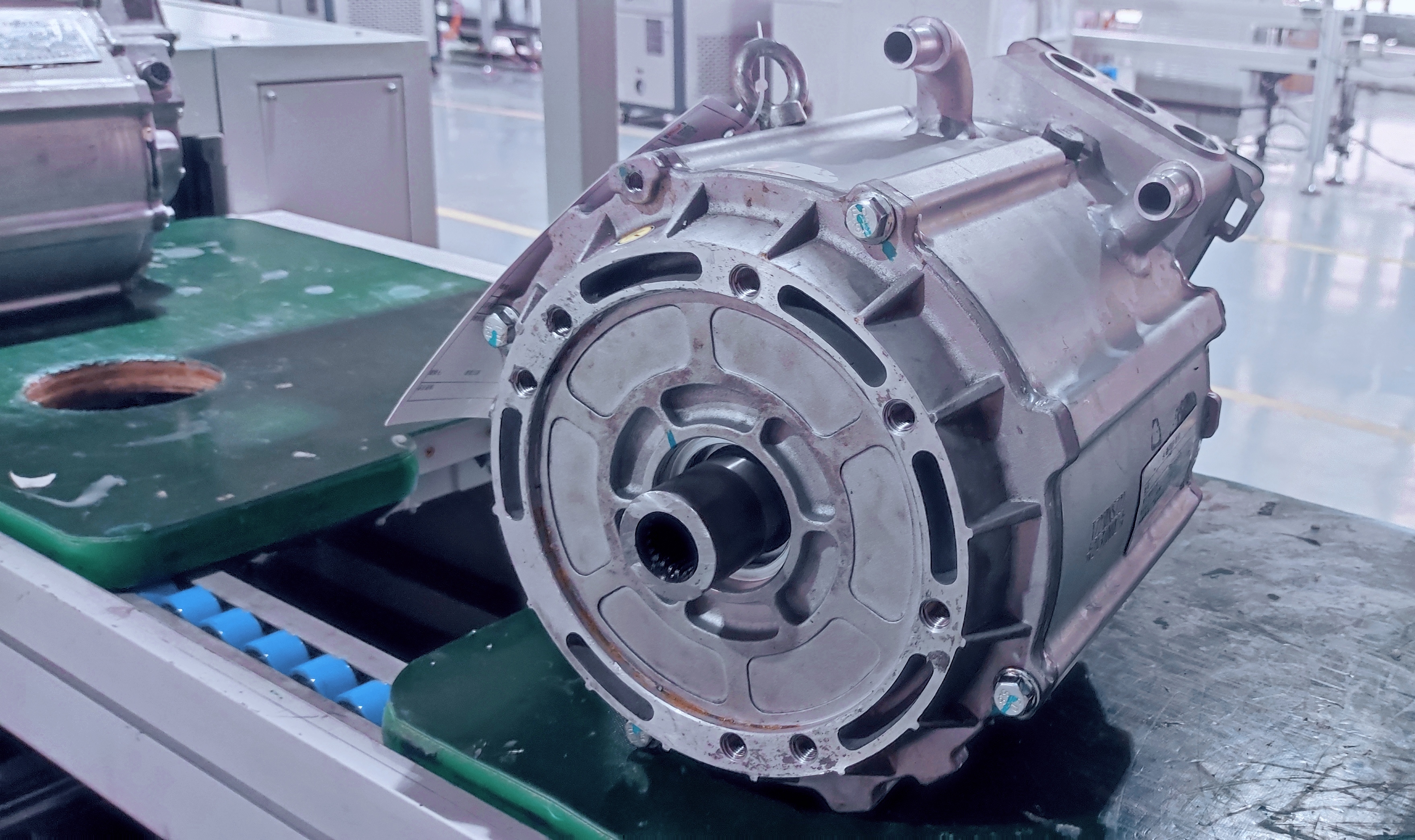
ซึ่งแตกต่างจากยานพาหนะของเครื่องยนต์สันดาปภายใน (ICE) ที่ต้องการสร้างพลังงานค่อยๆเนื่องจากความล่าช้าทางกลและการเผาไหม้ EVs จะส่งแรงบิดสูงสุดทันที สิ่งนี้มีอยู่ในมอเตอร์ไฟฟ้าซึ่งไม่ได้พึ่งพาการเลื่อนเกียร์ที่ซับซ้อนหรือเครื่องยนต์รอบ ๆ เพื่อให้ถึงแรงบิดสูงสุด
แต่ความสามารถของมอเตอร์ดิบเป็นเพียงส่วนหนึ่งของเรื่องราว - ตรรกะการควบคุมของ MCU ช่วยให้มั่นใจได้ว่าแรงบิดนี้จะถูกส่งในเวลาที่เหมาะสมในปริมาณที่เหมาะสมและโดยไม่ต้องเสียสละความปลอดภัยหรือความสะดวกสบาย

ความสำคัญของการเร่งความเร็วในประสบการณ์ผู้ใช้
ความเร็วเป็นสิ่งหนึ่ง - การรับรู้การเร่งความเร็วเป็นอีกสิ่งหนึ่ง
ผู้ผลิต EV ในปัจจุบันไม่เพียง แต่จะแข่งขันในช่วงและการออกแบบเท่านั้น แต่ยังรวมถึงความรู้สึกที่ราบรื่นเป็นธรรมชาติและน่าตื่นเต้น “ ความรู้สึก” ของการเร่งความเร็วส่งผลโดยตรง:
- ความมั่นใจของผู้ขับขี่
- การรับรู้ประสิทธิภาพของยานพาหนะ
- การรับรู้แบรนด์ (คิดว่า "โหมด ludicrous" ของ Tesla))
- ความสะดวกสบายของผู้โดยสาร (การเร่งความเร็วกระตุกอาจไม่มั่นคง)
นี่คือที่ตรรกะการควบคุมมอเตอร์มีบทบาทสำคัญ MCU ปรับเส้นโค้งการเร่งความเร็วตามข้อมูลเซ็นเซอร์สภาพถนนโหลดยานพาหนะและแม้แต่โหมดการขับขี่ (Eco, Sport, Normal) ผลลัพธ์? ประสบการณ์การขับขี่ที่มีทั้งอวัยวะภายในและควบคุมได้
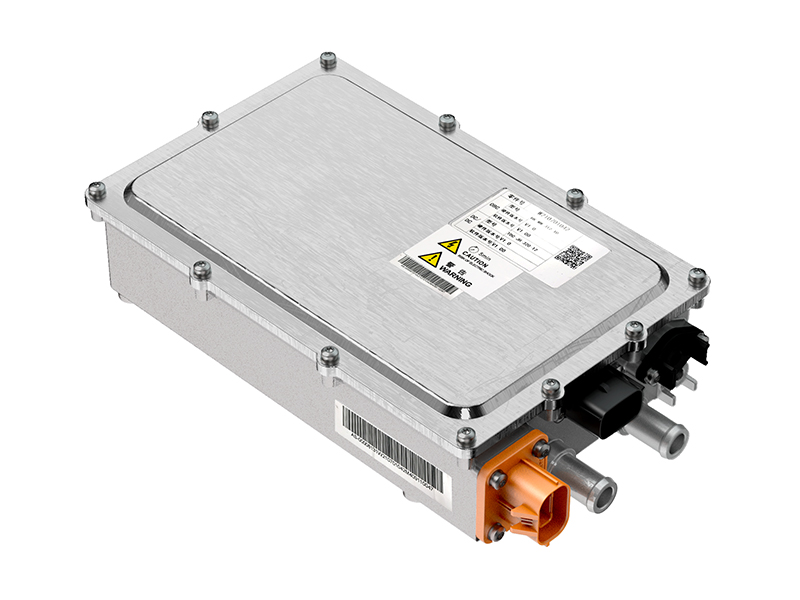
MCU คืออะไรและทำอะไรใน EV?
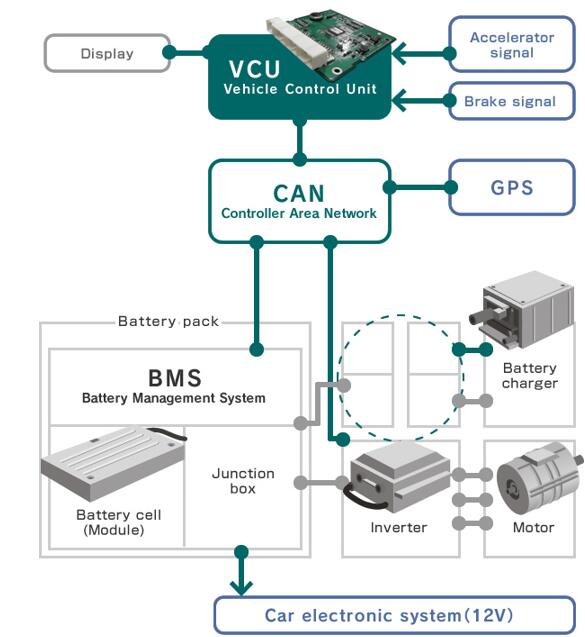
หน่วยควบคุมมอเตอร์ (MCU) เป็นสมองดิจิตอลที่รับผิดชอบในการจัดการมอเตอร์ไฟฟ้าใน EV มันตั้งอยู่ระหว่างคันเร่งคันเร่งและอินเวอร์เตอร์มอเตอร์และทำหน้าที่เป็นชั้นควบคุมระหว่างความตั้งใจของผู้ขับขี่และการขับเคลื่อนด้วยไฟฟ้า
ฟังก์ชั่นสำคัญของ MCU:
- ตีความอินพุตคันเร่งเร่งความเร็ว
- คำนวณเอาต์พุตแรงบิดที่ดีที่สุด
- ตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่อุณหภูมิและกระแสไฟฟ้า
- จัดการความเร็วและทิศทางการหมุนของมอเตอร์
- ประสานการเบรกใหม่
- สร้างความมั่นใจในความปลอดภัยของระบบผ่านการตรวจจับความผิดพลาด
ในสาระสำคัญ MCU ช่วยให้มั่นใจได้ว่ามอเตอร์ไฟฟ้าจะทำงานได้สอดคล้องกับความคาดหวังของผู้ขับขี่เงื่อนไขยานพาหนะและโปรโตคอลความปลอดภัย-ทั้งหมดในเวลาจริง
จาก Pedal to Power: การแปลอินพุตไดรเวอร์เป็นการเคลื่อนไหว
ลองตรวจสอบเหตุการณ์ทั่วไปของเหตุการณ์:
1. ขับเคลื่อนกดคันเร่ง
2. เซ็นเซอร์ตำแหน่งเหยียบ (มักจะเป็นเซ็นเซอร์เอฟเฟกต์ฮอลล์) ส่งสัญญาณแรงดันไฟฟ้าไปยัง MCU
3. MCU อ่านสัญญาณนี้และตีความจำนวนแรงบิดที่ควรส่งมอบ
4. ยังมีการอ้างอิง:
- สถานะแบตเตอรี่
- ข้อเสนอแนะการควบคุมแรงฉุด
- อุณหภูมิมอเตอร์
- โหมดการขับขี่
5. MCU ส่งคำสั่งไปยังอินเวอร์เตอร์ซึ่งปรับแรงดันไฟฟ้าและการไหลของกระแสไฟฟ้าไปยังมอเตอร์ไฟฟ้า
6. การหมุนของมอเตอร์ - และแรงบิดถูกส่งไปยังล้อ
วัฏจักรทั้งหมดนี้เกิดขึ้นในมิลลิวินาทีด้วยความเร็วของอุปกรณ์อิเล็กทรอนิกส์ดิจิตอลและโปรเซสเซอร์ฝังตัวที่ทรงพลังภายใน MODER MCUS
MCU ตีความสัญญาณเร่งความเร็วอย่างไร
ตรงกันข้ามกับสมมติฐานที่เรียบง่ายว่าคันเร่งคันเร่งเป็นเหมือนลูกบิดระดับเสียง EV ที่ทันสมัยใช้เทคนิคการตีความที่ซับซ้อน:
สัญญาณคันเหยียบแบบสองช่องทาง
เพื่อความปลอดภัยโดยทั่วไปแล้วเหยียบจะมีเซ็นเซอร์ซ้ำซ้อนสองตัวที่ต้องเห็นด้วยกับตำแหน่งเหยียบ ที่MCUข้ามตรวจพวกเขาอย่างต่อเนื่อง
การทำแผนที่สัญญาณ
MCU ไม่ตอบสนองเชิงเส้นตรงไปยังตำแหน่งเหยียบ มันใช้เส้นโค้งการสอบเทียบตามโหมดไดรเวอร์ ตัวอย่างเช่น:
- โหมด Eco: การส่งแรงบิดค่อยๆมากขึ้น
- โหมดปกติ: การตอบสนองที่สมดุล
- โหมดสปอร์ต: แผนที่แรงบิดที่ก้าวร้าวและไวสูง
ข้อเสนอแนะแบบปรับตัว
MCUs บางคนใช้การเรียนรู้ของเครื่องหรืออัลกอริทึมแบบปรับตัวเพื่อเรียนรู้พฤติกรรมของไดรเวอร์และปรับการตอบสนองเมื่อเวลาผ่านไป สิ่งนี้สร้างประสบการณ์การขับขี่ที่เป็นส่วนตัว
การตอบสนองต่อแรงบิด: กุญแจสำคัญในการเร่งความเร็ว "ทันที"
การกำหนดลักษณะของประสิทธิภาพ EV คือแรงบิดทันทีและการจัดการนี่เป็นหนึ่งในงานที่สำคัญที่สุดของ MCU
เหตุใดมอเตอร์ไฟฟ้าจึงมีแรงบิดทันที
มอเตอร์ไฟฟ้าสร้างแรงบิดโดยตรงจากสนามไฟฟ้าและสนามแม่เหล็ก - ไม่ต้องรอรอบการเผาไหม้วาล์ววาล์วหรือการมีส่วนร่วมของเกียร์ ทันทีที่กระแสไหลผ่านสเตเตอร์โรเตอร์จะหมุน
บทบาทของ MCU ในการควบคุมแรงบิด
ในขณะที่มอเตอร์สามารถส่งแรงบิดเต็มได้ทันที แต่ก็ไม่ปลอดภัยหรือมีประสิทธิภาพเสมอไป MCU ปรับเปลี่ยนอย่างระมัดระวัง:
- อัตราการส่งแรงบิด (แรงบิดเพิ่มขึ้นอย่างรวดเร็ว)
- ขีด จำกัด การลากเพื่อป้องกันการลื่นของล้อ
- ขีด จำกัด ทางความร้อนเพื่อป้องกันมอเตอร์หรือแบตเตอรี่ร้อนเกินไป
- การเพิ่มประสิทธิภาพพลังงานเพื่อประสิทธิภาพและช่วง
บางระบบยังจำลองพฤติกรรมเหมือนน้ำแข็งเพื่อความคุ้นเคยหรือความสะดวกสบายที่ดีขึ้นโดยเฉพาะในยานพาหนะไฮบริด

การควบคุมการเพิ่มประสิทธิภาพการหน่วงเวลาใน MCUs สมัยใหม่
เวลาแฝง - ความล่าช้าระหว่างการกดแป้นเหยียบและการตอบสนองของยานพาหนะ - เป็นศัตรูของประสิทธิภาพ EV แบรนด์ EV ชั้นนำมีเป้าหมายสำหรับลูปควบคุม 10ms ที่มีความกระวนกระวายใจหรือการเปลี่ยนแปลงน้อยที่สุด
แหล่งที่มาของความล่าช้า:
- ความล่าช้าในการประมวลผลสัญญาณในเซ็นเซอร์เหยียบ
- เวลาในการคำนวณอัลกอริทึมใน MCU
- ความล่าช้าในการสื่อสารระหว่าง MCU และอินเวอร์เตอร์
- ความล่าช้าในการตอบสนองของมอเตอร์ (น้อยที่สุด)
เทคนิคการเพิ่มประสิทธิภาพ:
- ไมโครคอนโทรลเลอร์ที่เร็วขึ้นด้วยซีพียูหลายคอร์หรือ DSPS
- การกำหนดเวลาขั้นสูงเพื่อจัดลำดับความสำคัญของงานเรียลไทม์
- แบบจำลองการควบคุมการทำนายเพื่อคาดการณ์อินพุตไดรเวอร์
- ลดความซับซ้อนของสแต็คซอฟต์แวร์
ด้วยการลดความล่าช้าเหล่านี้ให้น้อยที่สุด EVs จะส่งการตอบสนองที่คมชัดซึ่งทำให้การเร่งความเร็วรู้สึกได้ทันทีและใช้งานง่าย
อนาคตของการควบคุมที่ใช้ MCU ใน EVS
เทคโนโลยี MCU ยังคงพัฒนาอย่างรวดเร็วเพื่อตอบสนองความต้องการที่เพิ่มขึ้นในประสิทธิภาพ EV ความปลอดภัยและการรวม AI
แนวโน้มที่จะดู:
1. การรวมกับ ADAS และ AI
Future MCUS จะรวมเข้ากับระบบช่วยเหลือผู้ขับขี่ขั้นสูง (ADAS) การปรับพฤติกรรมมอเตอร์ขึ้นอยู่กับสภาพถนนการตรวจจับคนเดินเท้าหรือข้อมูลการจราจร
2. การปรับแต่ง over-the-air (OTA)
เช่นเดียวกับเทสลาสามารถเพิ่มความเร่งผ่านการอัปเดตซอฟต์แวร์คาดว่า MCU จะรองรับการปรับแต่ง OTA เพื่อประสิทธิภาพประสิทธิภาพหรือความปลอดภัยแม้กระทั่งหลังการขาย
3. การวินิจฉัยที่เชื่อมต่อกับคลาวด์
MCUS จะรายงานสุขภาพของมอเตอร์สถานะความร้อนและรูปแบบการใช้งานไปยังคลาวด์มากขึ้นสำหรับการบำรุงรักษาทำนายและการเพิ่มประสิทธิภาพระยะไกล
4. การประสานงานหลายมอเตอร์
ใน EV AWD และ Quad-Motor, MCUS จะต้องมีการซิงโครไนซ์หลายช่องทางเพื่อควบคุมการใช้เวกเตอร์แรงบิดการลากและการเบรกแบบปฏิรูปอย่างราบรื่น
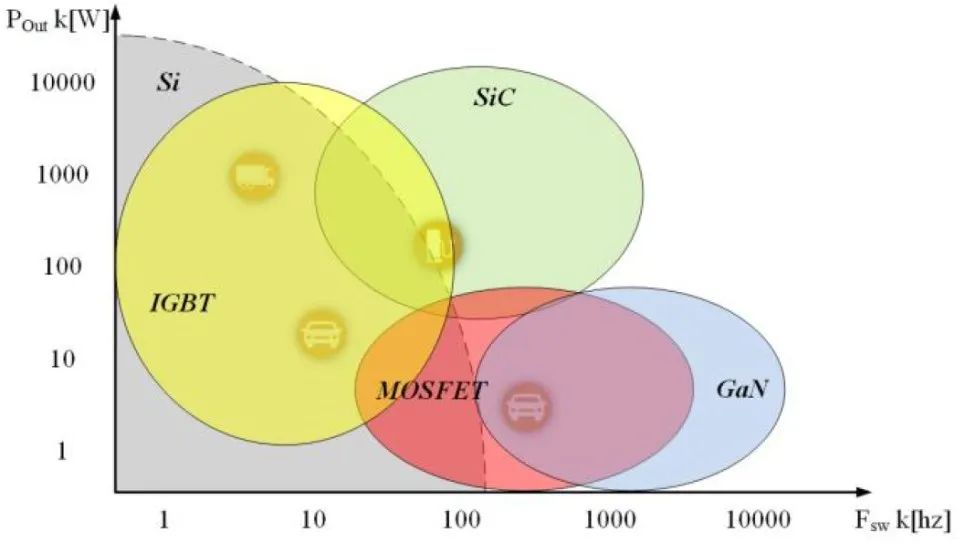
5. ความเข้ากันได้ของซิลิกอนคาร์ไบด์ (SIC)
ในขณะที่พลังงานอิเล็กทรอนิกส์เปลี่ยนไปเป็นระบบที่ใช้ SIC, MCUs ต้องรองรับความถี่การสลับที่สูงขึ้นซองจดหมายความร้อนที่เข้มงวดมากขึ้นและการจัดการข้อผิดพลาดขั้นสูง
บทสรุป
การเร่งความเร็วของยานพาหนะไฟฟ้าอย่างรวดเร็วไม่ได้เป็นเพียงผลข้างเคียงของมอเตอร์ไฟฟ้า-เป็นผลมาจากการควบคุมดิจิตอลที่พิถีพิถันซึ่งจัดการโดยชุดควบคุมมอเตอร์ (MCU) จากการตีความการป้อนข้อมูลเหยียบและการจัดการการส่งแรงบิดเพื่อลดความล่าช้าในการควบคุมและสร้างความมั่นใจในความปลอดภัย MCU เป็นฮีโร่ที่ไม่ได้รับการปฏิวัติ EV
ในขณะที่ EV ยังคงพัฒนาต่อไปบทบาทของตรรกะ MCU จะยิ่งสำคัญยิ่งขึ้น-การผสมผสานการควบคุมแบบเรียลไทม์กับ AI, การเชื่อมต่อคลาวด์และสถาปัตยกรรมระบบขับเคลื่อนที่ซับซ้อนมากขึ้น ครั้งต่อไปที่คุณรู้สึกว่าการเปิดตัว EV ที่ทำให้ดีอกดีใจโปรดจำไว้ว่า: มันไม่ใช่แค่ไฟฟ้าที่ทำงานได้ - มันเป็นซิมโฟนีของซอฟต์แวร์เซ็นเซอร์และซิลิคอนที่จัดทำโดย MCU