








News









































วิธีการอ่านพารามิเตอร์ของมอเตอร์แบบซิงโครนัสแม่เหล็กถาวร?
วิธีการอ่านพารามิเตอร์ของมอเตอร์แบบซิงโครนัสแม่เหล็กถาวร?
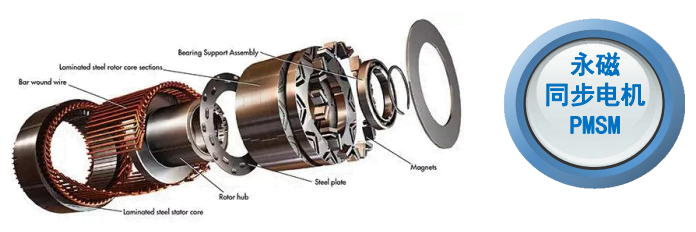
ทำความเข้าใจพารามิเตอร์ของมอเตอร์แบบซิงโครนัสแม่เหล็กถาวร (PMSM)เป็นพื้นฐานของการเลือกแอปพลิเคชันการควบคุมและการวินิจฉัยข้อผิดพลาด
พารามิเตอร์เหล่านี้มักจะแบ่งออกเป็นสองประเภท:
พารามิเตอร์แผ่น/พารามิเตอร์ประสิทธิภาพพื้นฐาน: โดยปกติแล้วจะถูกทำเครื่องหมายโดยตรงบนแผ่นมอเตอร์หรือในตารางข้อมูลจำเพาะของคู่มือผลิตภัณฑ์ซึ่งพบมากที่สุดโดยผู้ใช้
พารามิเตอร์การออกแบบ/พารามิเตอร์วงจรที่เทียบเท่า: พารามิเตอร์เหล่านี้มีความสำคัญสำหรับการวิเคราะห์เชิงลึกการควบคุมที่แม่นยำและการจำลองการจำลองของมอเตอร์ พวกเขามักจะพบในภาคผนวกทางเทคนิคของคู่มือผลิตภัณฑ์เอกสารการออกแบบหรือต้องการการทดสอบเพื่อให้ได้
ต่อไปนี้อธิบายถึงพารามิเตอร์สองประเภทนี้โดยละเอียด:
I. พารามิเตอร์ป้ายชื่อ / พารามิเตอร์ประสิทธิภาพพื้นฐาน
1. พลังงานที่ได้รับการจัดอันดับ:
ความหมาย: พลังงานเชิงกลที่มอเตอร์สามารถส่งออกได้อย่างต่อเนื่องปลอดภัยและน่าเชื่อถือภายใต้เงื่อนไขที่ได้รับการจัดอันดับ (แรงดันไฟฟ้าที่จัดอันดับความเร็วที่จัดอันดับโหลดจัดอันดับเงื่อนไขการระบายความร้อนที่ระบุ ฯลฯ ) หน่วยมักจะเป็นกิโลวัตต์หรือแรงม้า
ดูเป็น: นี่คือพารามิเตอร์หลักสำหรับการเลือกมอเตอร์เพื่อตอบสนองความต้องการโหลด ตรวจสอบให้แน่ใจว่ากำลังต่อเนื่องสูงสุดที่ต้องการโดยโหลดน้อยกว่าหรือเท่ากับกำลังไฟของมอเตอร์ สังเกตความแตกต่างระหว่างพลังงานที่ได้รับการจัดอันดับและกำลังสูงสุด (ความสามารถในการโอเวอร์โหลดระยะสั้น)
2. แรงดันไฟฟ้าที่ได้รับการจัดอันดับ:
ความหมาย: ค่าที่มีประสิทธิภาพของแรงดันไฟฟ้าสายที่ระบุในระหว่างการออกแบบและนำไปใช้กับสเตเตอร์ที่คดเคี้ยวของมอเตอร์ หน่วยคือโวลต์
สำหรับมอเตอร์ที่ขับเคลื่อนโดยคนขับสิ่งนี้มักจะหมายถึงค่าที่เทียบเท่าของแรงดันไฟฟ้าบัส DC อินเวอร์เตอร์ที่แปลงไปทางด้าน AC
วิธีการดู: ต้องจับคู่ความสามารถของแรงดันไฟฟ้าเอาต์พุตของไดรเวอร์ แรงดันไฟฟ้าสูงเกินไปจะทำลายฉนวนหรือทำให้เกิดความอิ่มตัวของแม่เหล็ก แรงดันไฟฟ้าต่ำเกินไปจะไม่สามารถส่งออกพลังงานและแรงบิดที่ได้รับการจัดอันดับ
3. ปัจจุบันจัดอันดับ:
ความหมาย: ค่าที่มีประสิทธิภาพของอินพุตกระแสไฟฟ้าสายสเตเตอร์จากแหล่งจ่ายไฟเมื่อมอเตอร์ส่งออกพลังงานที่กำหนดความเร็วความเร็วและแรงดันไฟฟ้าที่จัดอันดับ หน่วยเป็นแอมป์
วิธีการดู: ใช้ในการคำนวณพลังงานอินพุตเลือกความจุปัจจุบันไดรเวอร์ (กระแสไฟฟ้าที่กำหนดของไดรเวอร์จะต้องมากกว่ากระแสไฟฟ้าที่กำหนดไว้ของมอเตอร์) ออกแบบสายจ่ายไฟและอุปกรณ์ป้องกันโอเวอร์โหลด นอกจากนี้ยังสะท้อนขนาดของการสูญเสียทองแดงทางอ้อม
ความเร็วในการจัดอันดับ:
ความหมาย: ความเร็วในการหมุนของโรเตอร์ของมอเตอร์ที่แรงดันไฟฟ้าที่จัดอันดับความถี่ที่ได้รับการจัดอันดับและกำลังขับที่ได้รับการจัดอันดับ หน่วยคือการปฏิวัติต่อนาที
จำเป็นต้องตรงกับความต้องการความเร็วของโหลด วิธีทำความเข้าใจว่ามอเตอร์ทำงานด้วยความเร็วคงที่หรือไม่: จำเป็นต้องปรับให้ทำงานด้วยความเร็ว หมายเหตุความแตกต่างระหว่างความเร็วที่กำหนดและความเร็วสูงสุด (จำกัด โดยความแข็งแรงเชิงกลและความสามารถในการใช้แม่เหล็กที่อ่อนแอ)
5. ความถี่ที่ได้รับการจัดอันดับ:
ความหมาย: ความถี่ของแหล่งจ่ายไฟเมื่อมอเตอร์ขับเคลื่อนโดยตรงโดยแหล่งจ่ายไฟแบบไซน์ (เช่นกริด) สำหรับมอเตอร์ที่ขับเคลื่อนโดยตัวแปลงความถี่พารามิเตอร์นี้มักจะหมายถึงความถี่เอาต์พุตของไดรเวอร์ที่ความเร็วที่กำหนด
วิธีการดู: สำหรับแอปพลิเคชันความถี่พลังงานจะต้องตรงกับความถี่กริด (50Hz หรือ 60Hz) สำหรับแอปพลิเคชันความถี่ผันแปรพารามิเตอร์นี้เกี่ยวข้องโดยตรงกับความเร็วที่กำหนด (n = 60f /p โดยที่ p คือจำนวนเสา)
6. แรงบิดจัดอันดับ:
แรงบิดเชิงกลที่เกิดขึ้นจากมอเตอร์เมื่อมันส่งออกพลังงานที่ได้รับการจัดอันดับที่ความเร็วที่กำหนด หน่วย: n · m
สูตรคือ: t = p/w โดยที่ p คือกำลังการจัดอันดับ (วัตต์) และ w คือความเร็วเชิงมุมที่ได้รับการจัดอันดับ (เรเดียน/วินาที, w = 2πn/60, n คือความเร็วที่จัดอันดับในรอบต่อนาที) นี่คือพารามิเตอร์หลักที่จำเป็นในการเอาชนะแรงบิดความต้านทานศูนย์ของโหลด สังเกตความแตกต่างระหว่างแรงบิดที่ได้รับการจัดอันดับและแรงบิดสูงสุด (ความสามารถในการโอเวอร์โหลดระยะสั้น)
7. ประสิทธิภาพ:
ประสิทธิภาพการจัดอันดับของมอเตอร์ถูกกำหนดให้เป็นอัตราส่วนเปอร์เซ็นต์ของพลังงานกลไกเอาต์พุตต่อพลังงานไฟฟ้าอินพุต (PIN = √3 * V จัดอันดับโดยที่ V คือแรงดันไฟฟ้าที่จัดอันดับสำหรับระบบสามเฟส) สูตร n = (p_out / p_in) × 100% บ่งชี้ถึงความสามารถในการแปลงพลังงานไฟฟ้าเป็นพลังงานเชิงกล ประสิทธิภาพที่สูงขึ้นช่วยลดการสูญเสียพลังงาน (รวมถึงการสูญเสียทองแดงการสูญเสียธาตุเหล็กการสูญเสียเชิงกลและการสูญเสียการรั่วไหล) ในขณะที่ลดต้นทุนการดำเนินงาน โปรดทราบว่าประสิทธิภาพที่แสดงบนแผ่นชื่อมอเตอร์มักจะสะท้อนถึงเงื่อนไขที่จัดอันดับเท่านั้น
8. ปัจจัยพลังงาน:
ความหมาย: อัตราส่วนของอินพุตที่ใช้งานอยู่ต่อพลังงานที่ชัดเจน (cosφ) ภายใต้สภาพการทำงานที่ได้รับการจัดอันดับ มันสะท้อนให้เห็นถึงความสัมพันธ์เฟสระหว่างรูปคลื่นกระแสและแรงดันไฟฟ้าและระดับของการบิดเบือนในปัจจุบัน
วิธีการดู: ปัจจัยพลังงานสูงหมายถึงอัตราการใช้ประโยชน์สูงของกริดและ "มลพิษ" น้อยลงไปยังกริด PMSM มักจะมีปัจจัยพลังงานสูง (ใกล้กับ 1) ภายใต้เงื่อนไขที่ได้รับการจัดอันดับ ไดรเวอร์ (อินเวอร์เตอร์) เองก็ส่งผลกระทบต่อปัจจัยพลังงานในด้านอินพุต
9. ความถี่:
ความหมาย: จำนวนเสาแม่เหล็กทั้งหมด (เสา N และ S ปรากฏเป็นคู่) ของสนามแม่เหล็กของมอเตอร์ จำนวนเสาจะถูกระบุบนแผ่นป้าย
การดู: กำหนดความสัมพันธ์ระหว่างความเร็วแบบซิงโครนัสของมอเตอร์และความถี่ของแหล่งจ่ายไฟ (n sync = 60f/p) เสามากขึ้นส่งผลให้ความเร็วแบบซิงโครนัสต่ำกว่า แต่อาจมีความหนาแน่นแรงบิดสูงขึ้น พารามิเตอร์ที่มีผลต่ออัลกอริทึมการควบคุม (เช่นแบนด์วิดท์ผู้สังเกตการณ์)
10. ระดับฉนวน:
ความหมาย: อุณหภูมิการทำงานสูงสุดของวัสดุฉนวนกันความร้อนของขดลวดมอเตอร์ถูกระบุ เกรดทั่วไปคือ B (130 ° C), F (155 ° C), H (180 ° C)
วิธีการดู: กำหนดอุณหภูมิที่อนุญาตและความจุเกินพิกัดของมอเตอร์ ในสภาพแวดล้อมที่อุณหภูมิสูงหรือแอปพลิเคชันที่ต้องการเกินพิกัดสูงปลอดภัยและเชื่อถือได้มากขึ้นในการเลือกมอเตอร์ที่มีระดับฉนวนที่สูงขึ้น (เช่น F หรือ H)
11. คลาสป้องกัน:
ความหมาย: รหัส IP บ่งชี้ถึงความสามารถของมอเตอร์ที่อยู่อาศัยในการป้องกันไม่ให้มีสิ่งแปลกปลอมที่เป็นของแข็ง (ตัวเลขแรก) และของเหลว (หลักที่สอง) ไม่ให้เข้า ตัวอย่างเช่น IP54 (กันฝุ่นและกันน้ำ), IP65 (กันฝุ่นและกันน้ำ), IP67 (กันฝุ่นและป้องกันการแช่ในระยะสั้น)
วิธีการดู: เลือกตามสภาพฝุ่นความชื้นและความชื้นของสภาพแวดล้อมการติดตั้งมอเตอร์ สภาพแวดล้อมกลางแจ้งชื้นและเต็มไปด้วยฝุ่นต้องการระดับการป้องกันสูง (เช่น IP65 หรือสูงกว่า)
12. โหมดระบายความร้อน:
ความหมาย: วิธีการกระจายความร้อนมอเตอร์ คนทั่วไปคือ I0 411 (การระบายความร้อนด้วยพัดลมด้วยตนเอง, การกระจายความร้อนบนพื้นผิว), I0 416 (การระบายความร้อนด้วยอากาศ, พัดลมภายนอก), i0 410 (การระบายความร้อนตามธรรมชาติ, ไม่มีพัดลม), IC71W (การระบายความร้อนด้วยน้ำ)
วิธีการดู: มันมีผลต่อความหนาแน่นของพลังงานและความสามารถในการทำงานอย่างต่อเนื่องของมอเตอร์ มอเตอร์พลังงานสูงหรือขนาดกะทัดรัดมักจะถูกบังคับให้ระบายความร้อนด้วยอากาศหรือการระบายความร้อนด้วยน้ำ
ii. พารามิเตอร์การออกแบบ/พารามิเตอร์วงจรเทียบเท่า
พารามิเตอร์เหล่านี้มักจะใช้เพื่อสร้างแบบจำลองทางคณิตศาสตร์ของมอเตอร์ (โมเดลแกน DQ) สำหรับการควบคุมเวกเตอร์การจำลองการเพิ่มประสิทธิภาพประสิทธิภาพและการทำนายประสิทธิภาพ
1. ความต้านทานสเตเตอร์:
ความหมาย: ค่าความต้านทานของแต่ละเฟสของสเตเตอร์ที่คดเคี้ยวภายใต้ DC หรือความถี่ต่ำ หน่วยคือโอห์ม มักจะหมายถึงความต้านทานเฟส
วิธีการดู: มันมีผลต่อการคำนวณการสูญเสียทองแดงการตั้งค่าพารามิเตอร์การควบคุมลูปปัจจุบันและการประมาณค่าอุณหภูมิที่เพิ่มขึ้น ได้รับผลกระทบอย่างมีนัยสำคัญจากอุณหภูมิ (เพิ่มขึ้นตามอุณหภูมิ)
2.D-Axis inductance / q-axis inductance:
ความหมาย: พารามิเตอร์การเหนี่ยวนำของสเตเตอร์ที่กำหนดไว้ในระบบพิกัดการหมุนของโรเตอร์ (แกน D และแกน Q) แกน D เป็นไปตามทิศทางของสนามแม่เหล็กของแม่เหล็กถาวรและแกน Q คือมุมไฟฟ้า 90 องศาด้านหน้าของแกน A
LD: D-Axis inductance เนื่องจากการปรากฏตัวของแม่เหล็กถาวรการฝืนแม่เหล็กของวงจรแม่เหล็ก D-axis มีขนาดใหญ่และ LD มักจะมีขนาดเล็กหรือเป็นลบ (สำหรับ PMSM แบบฝัง)
q-axis inductance วงจรแม่เหล็กแกน Q ส่วนใหญ่ผ่านแกนสเตเตอร์และโรเตอร์ที่มีความต้านทานแม่เหล็กต่ำและ LQ มักจะมีขนาดใหญ่ LA:
พารามิเตอร์หลักกำหนด: แรงบิดแม่เหล็กไฟฟ้า: T = (3/2) × P [ψ±× LQ + (LD-LQ) × LD × LQ] (โดยที่ψ±หมายถึงการเชื่อมโยงฟลักซ์แม่เหล็กถาวร) หลักการพื้นฐานของ PMSM ที่สร้างแรงบิดที่ไม่เต็มใจอยู่ใน LD = LQ (สำหรับ IPMSM ที่มีอัตราส่วนขั้วสูง) ความสามารถในการแม่เหล็กที่อ่อนแอ: ค่า LD ที่เล็กกว่ามักจะเปิดใช้งานช่วงการทำงานของแม่เหล็กที่อ่อนแอและประสิทธิภาพความเร็วสูงที่เหนือกว่า แบนด์วิดธ์ลูปปัจจุบันและการออกแบบคอนโทรลเลอร์: การเหนี่ยวนำถือเป็นค่าคงที่เวลาหลักในส่วนประกอบความเฉื่อยลำดับแรกของลูปปัจจุบัน รูปคลื่น EMF ด้านหลังแม่เหล็กไฟฟ้าและแอมพลิจูดได้รับอิทธิพลอย่างมีนัยสำคัญจากระดับความอิ่มตัวของแม่เหล็ก (โดยเฉพาะอย่างยิ่งที่กระแสสูง)
3. ฟลักซ์แม่เหล็กถาวร:
ความหมาย: แอมพลิจูดของลิงก์แม่เหล็กที่สร้างขึ้นโดยแม่เหล็กถาวรในสเตเตอร์ที่คดเคี้ยว หน่วยคือเวเบอร์ มักจะหมายถึงลิงก์แม่เหล็กสูงสุดที่เกิดจากสนามแม่เหล็กถาวรของโรเตอร์ในการคดเคี้ยวสเตเตอร์
วิธีการดู: พารามิเตอร์หลัก! มันเป็นตัวกำหนด:
ค่าคงที่ EMF ด้านหลัง: ke = ψpm * w (โดยที่ w คือความเร็วเชิงมุมของสนามไฟฟ้า) ด้านหลัง EMF เป็นสัดส่วนกับความเร็วในการหมุน
ค่าคงที่แรงบิด: Kt ≈ (3/2) * P * ψ± (สำหรับ SPMSM ที่ติดตั้งบนพื้นผิว, LD ≈ LQ) แรงบิดเป็นสัดส่วนกับกระแสแกน Q
ความเร็วพื้นฐาน: ความเร็วสูงสุดที่มอเตอร์สามารถทำได้ที่แรงดันไฟฟ้าที่จัดอันดับ (เมื่อ EMF ด้านหลังใกล้กับแรงดันไฟฟ้าบัส)
จุดเริ่มต้นของการควบคุมแม่เหล็กที่อ่อนแอ
4. Back EMF ค่าคงที่:
คำจำกัดความ: ขนาดของ EMF ด้านหลัง (โดยทั่วไปจะอ้างถึง Line Back EMF) ที่สร้างขึ้นต่อการปฏิวัติโดยมอเตอร์ หน่วยคือ v/(krpm) หรือ vs/° วิธีการวัด: เกี่ยวข้องโดยตรงกับการเชื่อมโยงฟลักซ์แม่เหล็กถาวรψpm (ke = ψpm× w) ใช้ในการประเมิน EMF กลับด้วยความเร็วการหมุนใด ๆ (E = KE × N) ซึ่งเป็นสิ่งสำคัญสำหรับการกำหนดแรงดันไฟฟ้าบัสขั้นต่ำที่ต้องการโดยไดรฟ์ป้องกันการทำมากเกินไปและการควบคุมแม่เหล็กที่อ่อนแอ วัดได้ผ่านการทดสอบแบบไม่โหลด
5. ค่าคงที่แรงบิด:
ความหมาย: ขนาดของแรงบิดที่เกิดจากมอเตอร์ต่อหน่วยกระแส (สำหรับ SPMSM, ประมาณ KT ≈ (3/2)*P*ψpm) หน่วยคือ NM/A
การอ้างอิง: ใช้เพื่อประเมินคำสั่งปัจจุบัน Q-Axis ที่จำเป็นสำหรับคำสั่ง TORQUE ที่กำหนด (LQ_REF = T_REF / KT) โปรดทราบว่าสำหรับ IPMSM, KT ไม่คงที่เนื่องจากการมีอยู่ของแรงบิดและ magnetoresistance และแตกต่างกันไปตาม ID
6. ค่าคงที่เวลาไฟฟ้า:
ความหมาย: โดยปกติจะหมายถึงค่าคงที่เวลาไฟฟ้าของลูปปัจจุบัน, t_e = l / r (l มักจะใช้เป็น LQ หรือเฉลี่ย, r คือความต้านทานเฟส)
วิธีการดู: มันเป็นพารามิเตอร์สำคัญของคอนโทรลเลอร์ลูปปัจจุบันการออกแบบ (โดยปกติแล้ว PI regulator) ซึ่งกำหนดความเร็วในการตอบสนองของลูปปัจจุบัน
7. ค่าคงที่เวลาเชิงกล:
ความหมาย: การพิจารณาค่าคงที่เวลาของมอเตอร์และความเฉื่อยโหลดแรงเสียดทานและปัจจัยอื่น ๆ TM = J *R/(KT *KE) (J คือความเฉื่อยทั้งหมด)
วิธีการดู: ความเร็วในการตอบสนองของวงแหวนความเร็วเป็นข้อมูลอ้างอิงที่สำคัญสำหรับการออกแบบตัวควบคุมวงแหวนความเร็ว
8. ช่วงเวลาแห่งความเฉื่อย:
ความหมาย: ช่วงเวลาของความเฉื่อยของโรเตอร์มอเตอร์เอง หน่วย KG · M? วิธีการอ่าน: มันมีผลต่อความสามารถในการเร่งความเร็ว/การชะลอตัวของมอเตอร์การตอบสนองแบบไดนามิกของลูปความเร็วและความไวต่อการรบกวนการโหลด ระบบเซอร์โวมีข้อกำหนดสำหรับการจับคู่ช่วงเวลาของความเฉื่อย
9. กระแสสูงสุด:
ความหมาย: กระแสระยะสั้นสูงสุด (กระแสสูงสุด) ที่ได้รับอนุญาตจากมอเตอร์หรือไดรเวอร์ มักจะมากกว่ากระแสไฟฟ้าที่ได้รับการจัดอันดับ
วิธีการดู: กำหนดความสามารถในการโอเวอร์โหลดระยะสั้น (แรงบิดสูงสุด) ของมอเตอร์ มันถูก จำกัด โดยปัจจัยต่าง ๆ เช่นการทำความร้อนที่คดเคี้ยวความเสี่ยงการกำจัดแม่เหล็กแม่เหล็กถาวรและขีด จำกัด ปัจจุบันของผู้ขับขี่
10. การหมุนความเฉื่อย:
ความหมาย: ช่วงเวลาของความเฉื่อยของโรเตอร์มอเตอร์เอง หน่วย KG · M?
วิธีการดู: มันมีผลต่อความสามารถในการเร่งความเร็ว/การชะลอตัวของมอเตอร์การตอบสนองแบบไดนามิกของวงแหวนความเร็วและความไวต่อการรบกวนการโหลด ระบบเซอร์โวมีข้อกำหนดสำหรับการจับคู่ความเฉื่อยแบบหมุน
11. ความเร็วสูงสุด:
ความหมาย: ความเร็วสูงสุดที่มอเตอร์สามารถเข้าถึงได้ภายใต้ข้อกำหนดของความแข็งแรงเชิงกลการมีชีวิตการสั่นสะเทือนและเสียงรบกวน มักจะสูงกว่าความเร็วที่จัดอันดับมาก
วิธีการดู: กำหนดช่วงความเร็วในการทำงานของมอเตอร์ ด้วยความเร็วสูงสุดการควบคุมแม่เหล็กที่อ่อนแอมักจะต้องใช้เพื่อรักษาแรงบิด
คุณดูพารามิเตอร์เหล่านี้อย่างไร
1. จุดประสงค์ที่ชัดเจน:
การเลือกและการจับคู่: มุ่งเน้นไปที่พารามิเตอร์ของแผ่นป้าย (พลังงานแรงดันไฟฟ้าความเร็วแรงบิดการป้องกันการระบายความร้อน) เพื่อให้แน่ใจว่าข้อกำหนดการโหลดสภาพแวดล้อมและข้อกำหนดของแหล่งจ่ายไฟ มุ่งเน้นไปที่ประสิทธิภาพ (ต้นทุนการดำเนินงานระยะยาว)
การกำหนดค่าและการควบคุมไดรฟ์: นอกเหนือจากพารามิเตอร์ป้ายชื่อพารามิเตอร์การออกแบบ (R, LD, LQ, ψpm) จะต้องได้รับเป็นพื้นฐานสำหรับการบรรลุการควบคุมเวกเตอร์ประสิทธิภาพสูง (เช่น F0C) พารามิเตอร์คอนโทรลเลอร์ (พารามิเตอร์ PI หรือ KE/KT) และพารามิเตอร์ผู้สังเกตการณ์จะต้องตั้งค่าตามพารามิเตอร์เหล่านี้
การวิเคราะห์ประสิทธิภาพและการจำลอง: ชุดพารามิเตอร์วงจรที่เทียบเท่า (R, LD, LQ, ψpm, Y, ค่าสัมประสิทธิ์แรงเสียดทาน ฯลฯ ) เป็นสิ่งจำเป็นในการสร้างแบบจำลองทางคณิตศาสตร์ที่แม่นยำ
การวินิจฉัยความผิดพลาด: การเปลี่ยนแปลงพารามิเตอร์ (เช่นความต้านทานที่เพิ่มขึ้นอาจบ่งบอกถึงความร้อนสูงของการขดลวดและการเปลี่ยนแปลงในการเหนี่ยวนำอาจบ่งบอกถึงการลัดวงจรระหว่างเลี้ยวหรือการกำจัดแม่เหล็ก) สามารถใช้เป็นพื้นฐานการวินิจฉัย
2. ให้ความสนใจกับความสัมพันธ์ระหว่างพารามิเตอร์:
พลังงานความเร็วแรงบิด: p = t*w
แรงดันไฟฟ้า, back emf, ปัจจุบัน, การเหนี่ยวนำ: v ≈ e + ir + jwli (ความสัมพันธ์เวกเตอร์)
แรงบิด, ฟลักซ์แม่เหล็ก, กระแส: t = (3/2)* p* [ψ±* lq + (ld-lq)* ld* lq] ความเร็ว, ความถี่, ขั้วลอการิทึม: n_sync = 60f/p คง
3. การทำความเข้าใจลักษณะตามเงื่อนไขของพารามิเตอร์:
พารามิเตอร์จำนวนมาก (โดยเฉพาะพารามิเตอร์การออกแบบ R, LD และ LQ) ไม่ใช่ค่าคงที่ - พวกเขาแตกต่างกันไปตามอุณหภูมิกระแส (ความอิ่มตัวของแม่เหล็ก) และตำแหน่งของโรเตอร์ (ร่องฟัน) การควบคุมประสิทธิภาพสูงจะต้องคำนึงถึงปัจจัยที่ไม่เชิงเส้นเหล่านี้ ข้อมูลจำเพาะเกี่ยวกับแผ่นป้ายชื่ออุปกรณ์ถูกกำหนดภายใต้เงื่อนไขเฉพาะ (แรงดันไฟฟ้า, ความถี่, โหลด, การระบายความร้อนและอุณหภูมิ) เมื่อสภาพการทำงานจริงแตกต่างจากสถานการณ์ในอุดมคติเหล่านี้ประสิทธิภาพอาจเบี่ยงเบนจากจุดจัดอันดับ
4. ค้นหาเอกสารอย่างเป็นทางการ:
ข้อมูลจำเพาะของมอเตอร์มีรายละเอียดในตารางแผ่นอุปกรณ์และตารางข้อมูลจำเพาะประสิทธิภาพภายในคู่มือผลิตภัณฑ์ พารามิเตอร์การออกแบบที่สำคัญ (R, LD, LQ, ψpm, KE, KT) มักจะมีให้ใน "พารามิเตอร์ทางเทคนิค", "พารามิเตอร์วงจรที่เทียบเท่า" หรือ "พารามิเตอร์ควบคุม" ของคู่มือ หากไม่สามารถใช้งานได้ต้องได้รับเอกสารของผู้ผลิต พารามิเตอร์โดยละเอียดเช่นเส้นโค้งการเหนี่ยวนำในระดับความอิ่มตัวที่แตกต่างกันอาจต้องใช้เอกสารการออกแบบพิเศษหรือรายงานการทดสอบ
5. การวัดการทดสอบ:
หากไม่สามารถรับพารามิเตอร์อย่างเป็นทางการการวัดการทดลอง (เช่นการทดสอบบล็อกการทดสอบการลากแบบไม่มีโหลดการวัด LCR Meter อัลกอริทึมการระบุพารามิเตอร์ ฯลฯ ) เป็นสิ่งจำเป็น อย่างไรก็ตามสิ่งนี้ต้องใช้อุปกรณ์มืออาชีพและความรู้