








News









































วิศวกรรมเบื้องหลังมอเตอร์ 30,000 RPM ที่ผลิตจำนวนมาก: การแยกย่อยโรเตอร์และวิธีการ 1,000 MPa โดยสมบูรณ์
การพัฒนาขีดจำกัดด้านประสิทธิภาพทุกครั้งนั้นเกิดจากตรรกะทางวิศวกรรมที่สามารถย่อยสลายและทำซ้ำได้ ตั้งแต่ความแข็งแกร่งของวัสดุที่เพิ่มขึ้นเป็นสองเท่าไปจนถึงการทำงานร่วมกันของระบบหลักทั้งห้า
การผลิตมอเตอร์ขนาด 30,000 รอบต่อนาทีในปริมาณมากแสดงถึงการก้าวกระโดดของความร่วมมือในด้านวิศวกรรมในด้านวัสดุศาสตร์ การออกแบบแม่เหล็กไฟฟ้า การจัดการความร้อน การผลิตที่มีความแม่นยำ และอัลกอริธึมการควบคุม PUMBAAEV ได้กำหนดขอบเขตของเทคโนโลยีไดรฟ์ไฟฟ้าแม่เหล็กถาวรประสิทธิภาพสูงใหม่อย่างเป็นระบบ ผ่านความแข็งแกร่งของวัสดุโรเตอร์ที่เพิ่มขึ้นเป็นสองเท่า โครงสร้างแม่เหล็กรูปตัว U สองชั้น การม้วนกิ๊บที่มีพิทช์ไม่เท่ากัน 10 ชั้น การเคลือบเหล็กซิลิคอนบางเฉียบ และชิป 1500V SiC ที่พัฒนาขึ้นเองภายในบริษัท
ขอบเขตของเทคโนโลยีอยู่เหนือการทำซ้ำครั้งถัดไปเสมอ สำหรับวิศวกร คุณค่าของกรณีนี้อยู่ที่: เบื้องหลังทุกตัวชี้วัดประสิทธิภาพที่ดูเหมือนจะ "สุดขีด" นั้น ยังมีระเบียบวิธีทางวิศวกรรมที่ย่อยสลายและทำซ้ำได้
1 ภาพรวม: ค่านิยมหลักของความเร็วสูง
ด้วยการใช้ยานพาหนะพลังงานใหม่อย่างกว้างขวาง ความต้องการของผู้ใช้สำหรับสถานการณ์ในสนามแข่งและการทำงานด้วยความเร็วสูงอย่างยั่งยืนจึงเพิ่มขึ้นอย่างมาก มอเตอร์รถยนต์แบบดั้งเดิมจะมี "จุดเปลี่ยน" กำลังประมาณ 6,000 รอบต่อนาที โดยแรงบิดจะลดลงอย่างต่อเนื่องในบริเวณกำลังคงที่ ส่งผลให้ความรู้สึกเร่งความเร็วลดลงอย่างเห็นได้ชัดในระหว่างการแซงด้วยความเร็วสูงที่สูงกว่า 120 กม./ชม.
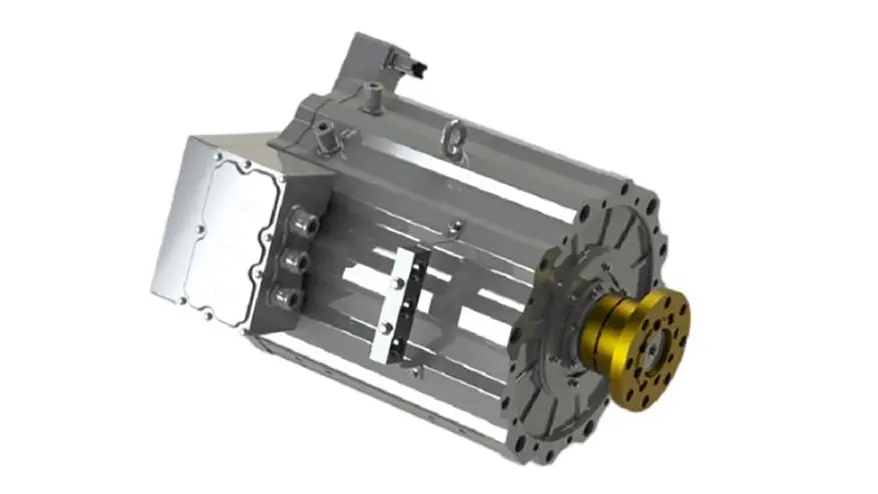
PUMBAAEV กำหนดและพัฒนาหน่วยขับเคลื่อนไฟฟ้าระดับ 30,000 รอบต่อนาที. คุณประโยชน์หลักมีมากกว่าประสิทธิภาพเพียงอย่างเดียว จากมุมมองทางวิศวกรรมระบบ ด้วยกำลังเอาท์พุตเป้าหมายเดียวกัน การเพิ่มความเร็วจาก 12,000 รอบต่อนาทีเป็น 30,000 รอบต่อนาที ช่วยลดการใช้วัสดุมอเตอร์แบบแอคทีฟได้อย่างมาก (ทองแดง แม่เหล็กหายาก เหล็กซิลิคอน)
จากข้อมูลการวิจัยของ AVL การเพิ่มความเร็วในการหมุนเป็นสองเท่าสามารถลดการใช้วัสดุแกนเหล็กได้ประมาณ 40%บรรลุการเพิ่มประสิทธิภาพการทำงานร่วมกันของปริมาณ น้ำหนัก และต้นทุน
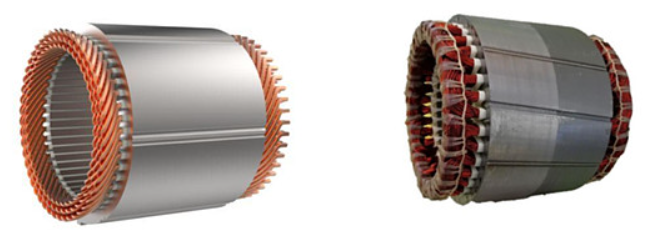
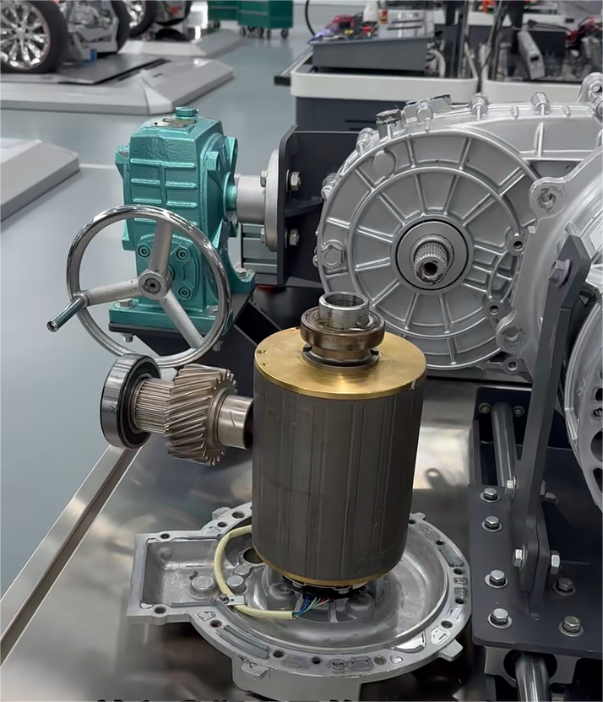
2 ระบบโรเตอร์: ห้าความท้าทายทางวิศวกรรมหลัก
โรเตอร์เป็นระบบย่อยที่เปราะบางที่สุดแต่สำคัญที่สุดในมอเตอร์ความเร็วสูง ที่ 30,000 รอบต่อนาที ความเร่งแบบแรงเหวี่ยงที่ขอบด้านนอกของโรเตอร์เกิน 40,000 ก. ข้อบกพร่องด้านการออกแบบอาจนำไปสู่ความล้มเหลวอย่างร้ายแรงได้ การเอาชนะความท้าทายนี้ต้องอาศัยความก้าวหน้าทางเทคนิคห้าด้าน
ความท้าทายที่ 1: ความแข็งแกร่งของวัสดุเพิ่มขึ้นเป็นสองเท่า จาก 450MPa เป็น 1000MPa ซิลิคอนสตีลความแข็งแรงสูง
การเคลือบโรเตอร์แบบดั้งเดิมใช้เหล็กกล้าไฟฟ้าที่ไม่มุ่งเน้นซึ่งมีความแข็งแรงครากประมาณ 450 MPa ซึ่งเพียงพอสำหรับความเร็วสูงสุด 20,000 รอบต่อนาที เมื่อเกิน 30,000 รอบต่อนาที ความเค้นดึงของห่วงที่เส้นผ่านศูนย์กลางภายนอกของโรเตอร์จะเกินขีดจำกัดอัตราผลตอบแทนของวัสดุทั่วไป
เส้นทางความก้าวหน้าทางวิศวกรรม:
-
การอัพเกรดวัสดุ: การใช้เหล็กไฟฟ้ากำลังสูง (HS-ECS) ช่วยเพิ่มความต้านทานแรงดึงถึง ≥1,000 เมกะปาสคาล—มากกว่าสองเท่าของระดับอุตสาหกรรมทั่วไป
-
การสนับสนุนกระบวนการ: การใช้การเชื่อมด้วยเลเซอร์สำหรับการเคลือบซ้อนแทนการโลดโผนแบบดั้งเดิม ช่วยเพิ่มแรงยึดเกาะระหว่างชั้นเพื่อป้องกันการแยกตัวด้วยความเร็วสูง การเจียรเส้นผ่านศูนย์กลางภายนอกอย่างแม่นยำมีพิกัดความเผื่อ ±3 ไมโครเมตรรับรองความกลมของโรเตอร์
ความท้าทายที่ 2: การตรึงด้วยแม่เหล็ก กระบวนการกาวที่มีการขยายตัวสูงเพื่อป้องกันความล้มเหลว
แม่เหล็กถาวรที่ฝังอยู่ในช่องโรเตอร์จะถูกกระแทกด้วยแรงเหวี่ยงอย่างรุนแรงที่ความเร็วสูง การติดกาวเฉพาะจุดแบบด้านเดียวแบบดั้งเดิมอาจเสี่ยงต่อการเกิดความเครียดที่ความเร็วสูง ภายใต้สภาวะที่รุนแรง แม่เหล็กสามารถหลุดออกจากผนังช่องหรือดีดออกได้ ทำให้เกิดความล้มเหลวอย่างร้ายแรง
เทคโนโลยีที่สำคัญ: การใช้การเคลือบกาวที่มีอัตราการขยายตัวสูง. หลังจากการบ่ม ปริมาตรจะขยายตัวมากกว่า 5 เท่า ทำให้เกิดส่วนต่อประสานการยึดติดที่สม่ำเสมอทั้งบนพื้นผิวด้านบนและด้านล่างของแม่เหล็ก ซึ่งช่วยเพิ่มการกระจายความเค้นได้อย่างมากเมื่อเทียบกับการติดแบบจุด วัสดุเคลือบต้องทนต่ออุณหภูมิ >180°C มีค่าสัมประสิทธิ์การขยายตัวทางความร้อนที่ตรงกับแม่เหล็ก (~10×10⁻⁶/°C) และมีค่าความต้านทานแรงเฉือนหลังการแข็งตัว ≥15 MPa
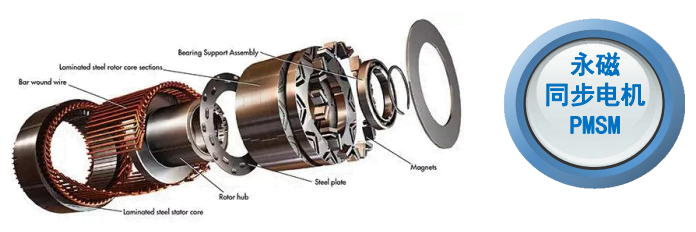
ความท้าทายที่ 3: โทโพโลยีของโรเตอร์ การจัดเรียงแม่เหล็กรูปตัว U สองชั้น ช่วยเพิ่มประสิทธิภาพวงจรแม่เหล็กและความแข็งแกร่ง
PUMBAAEV มีพนักงาน "รูปทรงตัว U สองชั้น" โทโพโลยีแม่เหล็กถาวรภายใน (IPM): ชั้น U ภายในซ้อนทับกับชั้น U ภายนอก โดยแม่เหล็กแต่ละชั้นจะแบ่งออกเป็นหลายส่วนเพิ่มเติม
ข้อดีหลัก:
-
เพิ่มแรงบิด: เพิ่มความแตกต่างฝืนของแกน q/แกน d ให้สูงสุด โดยเพิ่มแรงบิดสูงสุดประมาณ 10% โดยไม่ต้องเพิ่มวัสดุแม่เหล็กเพิ่มเติม
-
การกระจายความเครียด: โครงสร้างแบบแบ่งส่วนจะกระจายความเครียดออกเป็นหลายหน่วยอิสระ ป้องกันการแตกร้าวในบล็อกแม่เหล็กเสาหิน และลดความท้าทายในการผลิตการทำให้เป็นแม่เหล็ก
-
การเพิ่มประสิทธิภาพ NVH: โทโพโลยี double-U ผสมผสานกับการออกแบบที่เอียง ช่วยควบคุมความผิดเพี้ยนของฮาร์มอนิกรวม (THD) ของความหนาแน่นฟลักซ์ช่องว่างอากาศพื้นฐานให้ต่ำกว่า 5% ซึ่งระงับฮาร์โมนิกที่มีลำดับสูง
ภาพประกอบโครงสร้างโรเตอร์ของมอเตอร์ความเร็วสูง แสดงแม่เหล็กรูปตัว U สองชั้นและการออกแบบแบบแบ่งส่วน
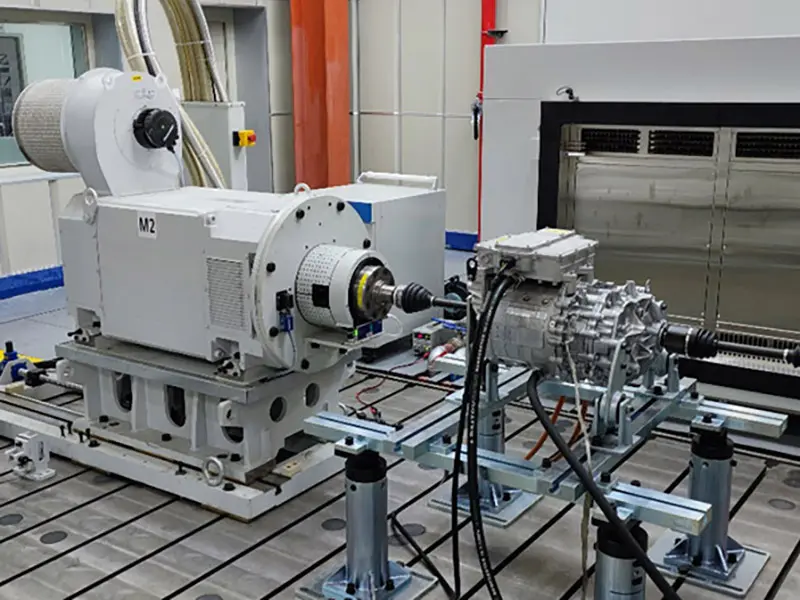
ความท้าทายที่ 4: การปรับสมดุลไดนามิกความเร็วสูง ความไม่สมดุลที่เหลือถูกจำกัดให้อยู่ภายใน 50 มก
ที่ 30,000 รอบต่อนาที ความไม่สมดุลเล็กๆ น้อยๆ ทำให้เกิดแรงเหวี่ยงหนีศูนย์หลายร้อยกิโลกรัม PUMBAAEV บีบอัดความไม่สมดุลที่เหลือจากระดับอุตสาหกรรมทั่วไปที่≤150มก ถึง≤50 มกลดลงถึง 67%
ห่วงโซ่กระบวนการสมดุลแบบไดนามิก: การตัดเฉือนหยาบ → การติดตั้งแม่เหล็กด้วยความร้อน → การปรับสมดุลเริ่มต้น → การตัดเฉือนที่มีความแม่นยำ → การตรวจสอบสมดุลไดนามิกความเร็วสูงเต็มช่วงความเร็ว (ทดสอบที่ 30,500 รอบต่อนาที) การแก้ไขความไม่สมดุลทำได้โดยการกัดรูกำจัดน้ำหนักที่ส่วนท้าย โดยมีความละเอียด ±1 มก. การตรวจสอบยืนยันขั้นที่สองหลังจากรอบการเปลี่ยนแปลงอุณหภูมิฉับพลันทำให้มั่นใจได้ถึงความเสถียรหลังการประกอบ
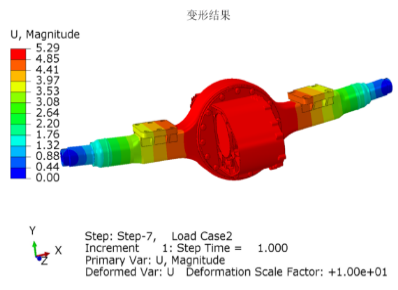
ความท้าทายที่ 5: การออกแบบความเร็ววิกฤต, อัตราความปลอดภัย 15%
การสั่นสะเทือนจะขยายอย่างมากเมื่อความเร็วในการทำงานเข้าใกล้ความเร็ววิกฤตของการโค้งงอครั้งแรกของโรเตอร์ PUMBAAEV ออกแบบความเร็ววิกฤติในการดัดงอครั้งแรกให้เป็น 35,000 รอบต่อนาทีซึ่งสูงกว่าความเร็วการทำงานสูงสุดที่กำหนดประมาณ 15% ซึ่งให้อัตราความปลอดภัยที่เพียงพอ
เส้นทางการนำไปปฏิบัติ: เพิ่มช่วงรองรับแบริ่งและพรีโหลดเพื่อเพิ่มความแข็งในการดัดงอของเพลา ใช้งานไปพร้อมๆ กันตลับลูกปืนเซรามิกซิลิคอนไนไตรด์ (Si₃N₄) เพื่อรักษาความแข็งของตลับลูกปืนที่ค่า DN ที่สูงขึ้น (ความเร็ว × เส้นผ่านศูนย์กลางของรู) ในขณะเดียวกันก็เป็นฉนวนธรรมชาติต่อการกัดกร่อนของกระแสเพลา
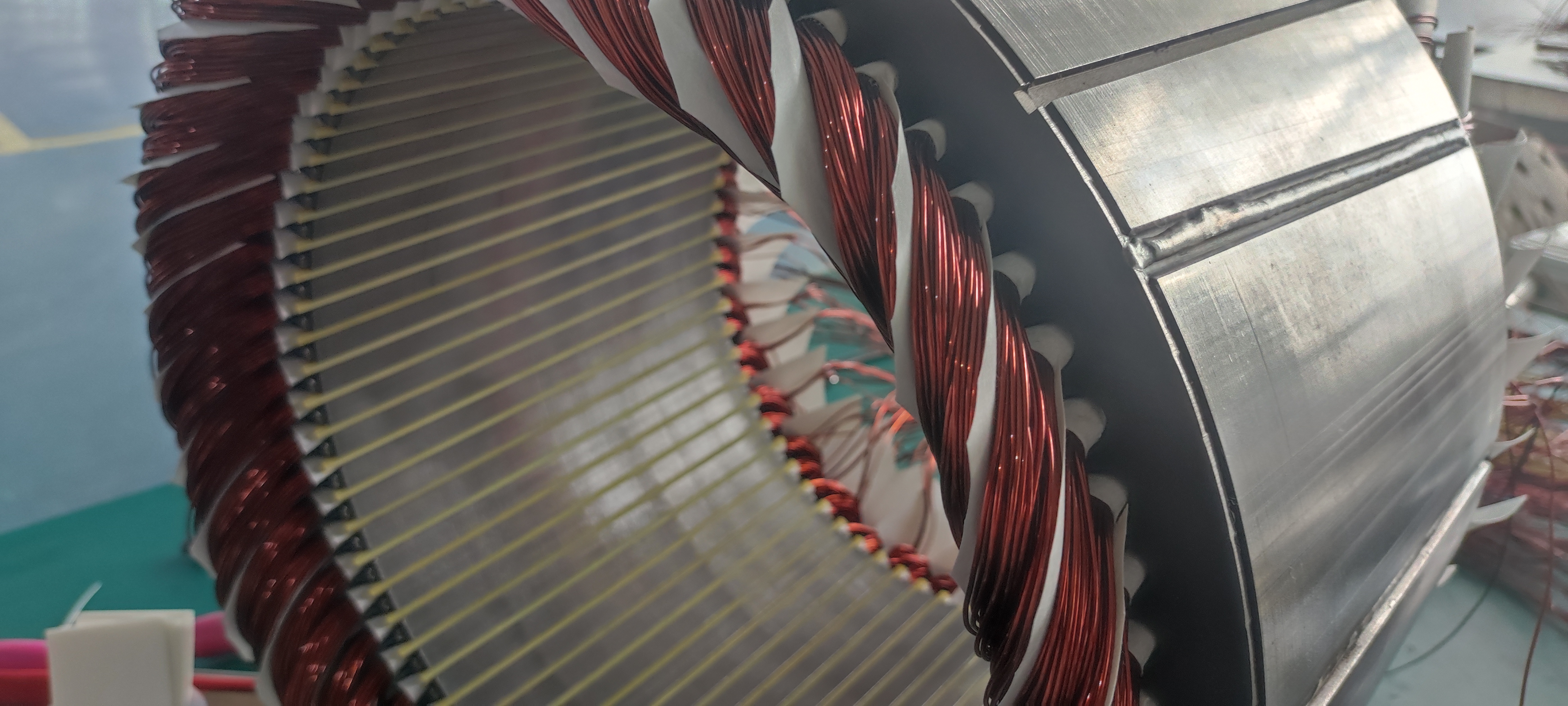
3 สเตเตอร์และการจัดการความร้อน: การโจมตีแบบประสานงานกับการสูญเสียความถี่สูง
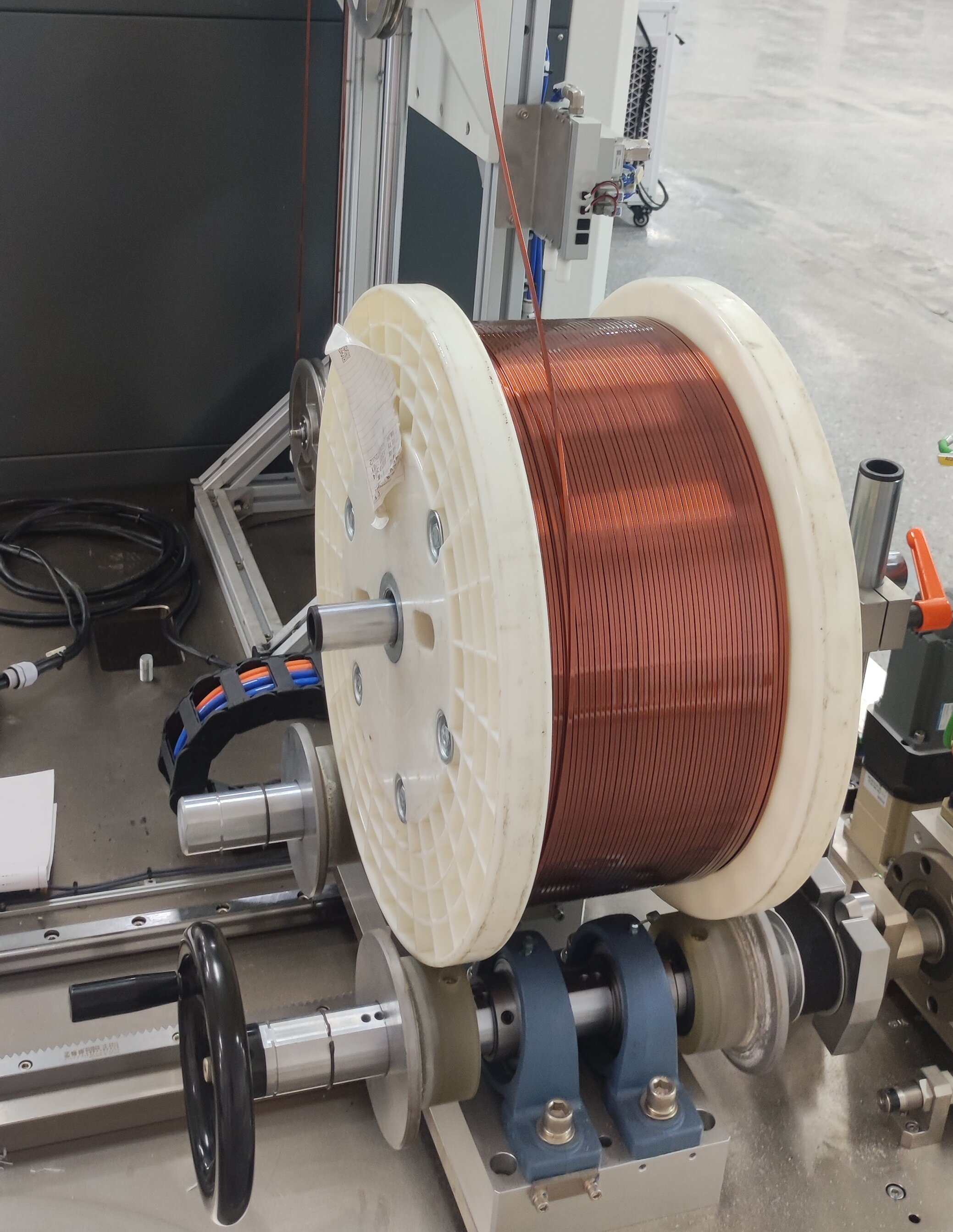
ที่ 30,000 รอบต่อนาที ความถี่ไฟฟ้าจะถึง 500 เฮิรตซ์. ผลกระทบของผิวหนังในการพันขดลวดแบบดั้งเดิมทำให้เกิดการสูญเสียทองแดง AC เพิ่มขึ้น จำเป็นต้องใช้วิธีแก้ปัญหาร่วมกันของการพันขดลวดแบบกิ๊บติดผมและการระบายความร้อนด้วยน้ำมันโดยตรง
การม้วนกิ๊บ: การออกแบบระยะพิทช์ไม่เท่ากัน 10 ชั้นช่วยปรับอัตราส่วนการสูญเสียทองแดง AC/DC ให้เหมาะสม
ค่าตัวประกอบการเติมทองแดงของลวดแบนหน้าตัดสี่เหลี่ยมสามารถเกิน 60% ซึ่งเหนือกว่าลวดกลมมากที่ 40-45% ซุปเปอร์มอเตอร์สเตเตอร์ของ PUMBAAEV ใช้การม้วนกิ๊บที่มีระยะพิทช์ไม่เท่ากัน 10 ชั้นโดยมีความหนาต่างกันของแผ่นทองแดงในแต่ละชั้น
-
ชั้นนอกจะบางกว่า: ใกล้กับช่องเปิด พวกมันจะพกพาส่วนประกอบกระแสไฟฟ้าความถี่สูงไว้เป็นพิเศษ
-
ชั้นในมีความหนามากขึ้น: ใกล้กับด้านล่างของช่อง จะมีส่วนประกอบ DC เป็นหลัก
การออกแบบนี้ควบคุมอัตราการสูญเสียทองแดง AC/DC ประมาณ 1.15 (โดยทั่วไปในอุตสาหกรรมคือ 1.3-1.5) ในขณะที่ช่องว่างระหว่างชั้นที่ไม่เท่ากันช่วยเพิ่มประสิทธิภาพหน้าตัดของการไหลสำหรับน้ำมันหล่อเย็น
วัสดุหลัก: การเคลือบบางเฉียบช่วยลดการสูญเสียเหล็กความถี่สูงได้อย่างมาก
การสูญเสียหลักเพิ่มขึ้นตามความถี่ ที่ 500 Hz การสูญเสียจากไฟกระชากของเหล็กซิลิกอนแบบดั้งเดิม 0.35 มม. PUMBAAEV ใช้เหล็กไฟฟ้าความถี่สูงบางพิเศษที่มีความหนา ≤0.2 มม, ลดการสูญเสียคอร์ที่ 500 Hz โดย 40-50% เทียบกับเหล็ก 0.35 มม. การเคลือบที่บางลงยังเพิ่มพื้นที่ผิวสำหรับการกระจายความร้อนต่อหน่วยปริมาตร
ระบบระบายความร้อน: การระบายความร้อนด้วยน้ำมันโดยตรงช่วยให้การจัดการความร้อนมีประสิทธิภาพ
ความหนาแน่นทางความร้อนของสเตเตอร์ที่ 30,000 รอบต่อนาทีนั้นสูงมาก เกินกว่าความสามารถในการระบายความร้อนด้วยแจ็คเก็ตแบบดั้งเดิม PUMBAAEV รวมทางเดินน้ำมันหล่อเย็นภายในช่องสเตเตอร์ ซึ่งช่วยให้น้ำมันไหลระหว่างขดลวด การทำความเย็นแบบสัมผัสโดยตรงกับขดลวดทองแดง.
การทำงานร่วมกันทางความร้อนแบบสามง่าม: :
-
การเคลือบบางเฉียบ: ลดการสูญเสียธาตุเหล็กและเพิ่มพื้นที่ผิว
-
กิ๊บติดผมที่มีระยะห่างไม่เท่ากัน: เพิ่มประสิทธิภาพช่องทางการไหลของน้ำมันหล่อเย็น
-
ระบายความร้อนด้วยน้ำมันโดยตรง: ให้ความเย็นแบบสัมผัสโดยตรง การวัดแสดงให้เห็นว่าอุณหภูมิของขดลวดในสภาวะคงตัวสามารถควบคุมได้ ภายใน 5°Cโดยมีอุณหภูมิสูงสุดลดลงประมาณ 40°C
4 การควบคุม NVH: การแสวงหาความเงียบในยุคไฟฟ้า
เมื่อเสียงรบกวนพื้นหลังลดลงใน EV เสียงมอเตอร์จะรับรู้ได้มากขึ้น ความถี่พื้นฐาน 500 Hz ที่ 30,000 rpm และฮาร์โมนิคของความถี่นั้นอยู่ในช่วงที่ละเอียดอ่อนที่สุดในการได้ยินของมนุษย์ (500-4000 Hz)
แหล่งกำเนิดเสียงกระตุ้นเบื้องต้น: :
-
ฮาร์โมนิคแรงแม่เหล็กไฟฟ้า: สร้างโดยฮาร์โมนิกเชิงพื้นที่ของความหนาแน่นฟลักซ์ของช่องว่างอากาศ (กำหนดโดยรูปร่างแม่เหล็ก โครงสร้างขดลวด)
-
อินเวอร์เตอร์ PWM ฮาร์โมนิคส์: การสลับความถี่และทวีคูณทำให้เกิดฮาร์โมนิครูปคลื่นในปัจจุบัน และฮาร์โมนิคแรงแม่เหล็กที่น่าตื่นเต้นยิ่งขึ้น
-
ความไม่สมดุลทางกล: ความไม่สมดุลที่เหลือของโรเตอร์จะสร้างความถี่ในการหมุน 1 เท่า (500 Hz) ซึ่งจะต้องแยกออกจากความถี่เรโซแนนซ์ของแบริ่งและตัวเรือน
กลยุทธ์การควบคุม Triple NVH: :
-
การเพิ่มประสิทธิภาพแม่เหล็กไฟฟ้า: การเพิ่มประสิทธิภาพหลายวัตถุประสงค์ของรูปร่างช่อง มุมเอียง ฯลฯ เพื่อลดแอมพลิจูดของฮาร์โมนิกแรงแม่เหล็กไฟฟ้า (เช่น ลำดับ 6N) การเรียงซ้อนแบบขดลวดที่มีความแม่นยำสูงใช้สำหรับเอียง
-
การเสริมแรงโครงสร้างและการแยก: ปรับปรุงความแข็งของยูนิต e-drive โดยรวม (โครงโครง) เพื่อเปลี่ยนความถี่เรโซแนนซ์ออกไปจากย่านความถี่ที่ใช้งานได้ ใช้บูชแยกการสั่นสะเทือนประสิทธิภาพสูงที่จุดยึดเพื่อลดการถ่ายโอนการสั่นสะเทือนผ่านเส้นทางโครงสร้าง
-
การปรับสมดุลแบบไดนามิกที่มีความแม่นยำสูง: ความไม่สมดุลที่ตกค้าง ≤50 มก. ช่วยให้มั่นใจได้ว่าความเร่งการสั่นสะเทือนที่การกระตุ้น 1X (500 Hz) คือ <0.1 ก. พร้อมการควบคุมความแปรผันของวงจรชีวิต
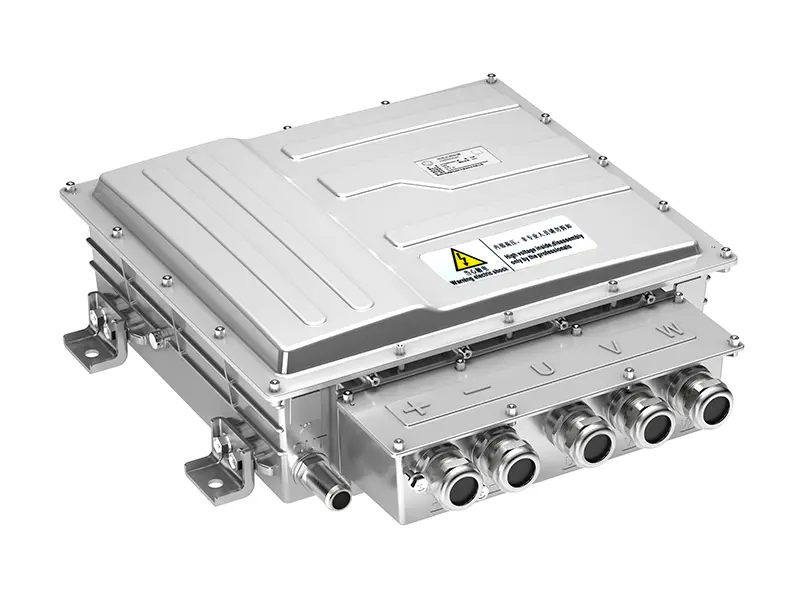
5 การควบคุมและอิเล็กทรอนิกส์กำลัง: บทบาทสำคัญของชิป SiC
ความถี่สูงและประสิทธิภาพสูงเป็นข้อกำหนดโดยธรรมชาติสำหรับมอเตอร์ความเร็วสูง ซึ่งขึ้นอยู่กับความก้าวหน้าในการควบคุมและอุปกรณ์กำลังโดยตรง
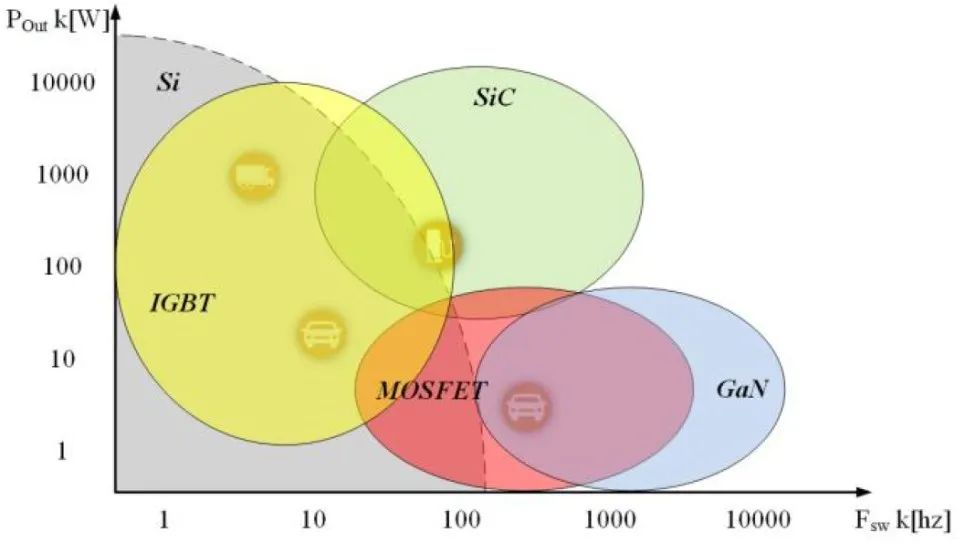
ชิป SiC 1500V ที่พัฒนาขึ้นภายในบริษัท ถือเป็นความก้าวหน้าครั้งสำคัญ เมื่อเปรียบเทียบกับ IGBT แบบเดิม SiC MOSFET ช่วยให้:
-
ความถี่ในการสลับที่สูงขึ้น: รองรับความเร็วมอเตอร์ที่สูงขึ้น (ความถี่ไฟฟ้า)
-
ลดการสูญเสียการสลับ: ปรับปรุงประสิทธิภาพของระบบโดยเฉพาะในพื้นที่ที่มีความเร็วสูง
-
ระดับแรงดันไฟฟ้าที่สูงขึ้น: อัตรา 1500V ให้ความปลอดภัยสำหรับแพลตฟอร์ม 800V และการพัฒนาในอนาคต
อัลกอริธึมการควบคุมจะต้องจับคู่อย่างลึกซึ้งกับมอเตอร์ เพื่อให้มั่นใจว่าการทำงานมีความเสถียรในบริเวณที่มีสนามอ่อนด้วยความเร็วสูงและมีประสิทธิภาพสูงสุด
6 ความท้าทายและวิวัฒนาการในอนาคต
คอขวดทางเทคโนโลยีที่มีอยู่
-
ต้นทุนวัสดุ: เหล็กไฟฟ้าที่มีความแข็งแรงสูงและการเคลือบแบบพิเศษยังคงมีราคาแพงกว่าโซลูชันทั่วไปถึง 20-30%
-
ซิลิคอน สตีล ลิมิต: การเคลือบที่บางลงช่วยลดการสูญเสียธาตุเหล็กแต่ลดความแข็งลง การแลกเปลี่ยนความแข็งของการสูญเสียธาตุเหล็กถือเป็นความท้าทายหลัก
-
ความน่าเชื่อถือตลอดอายุการใช้งานของแบริ่ง: ความน่าเชื่อถือตลอดอายุการใช้งานของตลับลูกปืนเซรามิกความเร็วสูงที่ค่า DN สูงเป็นพิเศษ ต้องใช้ข้อมูลการทดสอบบนถนนมากขึ้น
-
ห่วงโซ่อุปทาน SiC: อัตราผลตอบแทนและต้นทุนสำหรับชิป SiC ของบริษัท โดยเฉพาะซับสเตรต 4H-SiC ถือเป็นอุปสรรคสำคัญในอุตสาหกรรม
เส้นทางเทคโนโลยีแห่งอนาคต
-
วัสดุใหม่: วัสดุแม่เหล็กอ่อนแบบอะมอร์ฟัส/นาโนคริสตัลไลน์ให้การสูญเสียแกนกลางต่ำกว่าเหล็กซิลิคอนประมาณ 60% และเป็นตัวเลือกที่สำคัญสำหรับแกนสเตเตอร์รุ่นต่อไป แม้ว่าความท้าทายจะยังคงอยู่ในการประมวลผลวัสดุที่เปราะก็ตาม
-
โทโพโลยีใหม่: Axial Flux Motors (AFM) ซึ่งมีโครงสร้างรูปทรงแผ่นดิสก์ที่เหมาะสำหรับความเร็วสูงโดยธรรมชาติ อยู่ในแผนงานของ OEM บางราย โดยมีความหนาแน่นของกำลังทางทฤษฎีสูงกว่ามอเตอร์แบบ Radial Flux ถึง 20-40%
-
การจัดการระบายความร้อนแบบรวม: การใช้น้ำมันหล่อเย็นร่วมกันระหว่างสเตเตอร์และโมดูลพลังงานอินเวอร์เตอร์สามารถลดความต้านทานความร้อนได้ ~30% และลดความซับซ้อนของสถาปัตยกรรมระบบ
-
การปฏิวัติการออกแบบที่ขับเคลื่อนด้วย AI: การจำลองร่วมหลายฟิสิกส์ (แม่เหล็กไฟฟ้า-ความร้อน-โครงสร้าง-NVH) ควบคู่กับ AI/อัลกอริธึมการปรับให้เหมาะสม มีศักยภาพในการบีบอัดวงจรการพัฒนามอเตอร์ความเร็วสูงจาก 24 เดือนเป็นต่ำกว่า 12 เดือน
ขอบเขตของเทคโนโลยีอยู่เหนือการทำซ้ำครั้งถัดไปเสมอ การผลิตมอเตอร์ 30,000 รอบต่อนาทีในปริมาณมากถือเป็นการเปิดวงจรเทคโนโลยีใหม่ที่ขับเคลื่อนโดยระเบียบวิธีทางวิศวกรรมระบบ การบูรณาการในแนวตั้งเชิงลึก และการคิดทางวิศวกรรมขั้นสูงสุด