








Pumbaa 125/250kW E-axle กลางสำหรับรถบรรทุกขยะ /รถบรรทุกสปริงเกอร์ไฟฟ้า

Pumbaa 125/250kW E-axle กลางสำหรับรถบรรทุกขยะ /รถบรรทุกสปริงเกอร์ไฟฟ้า
ข้อกำหนด PUMBAA PMEA40000Z Central E-axle
|
พารามิเตอร์ทางเทคนิค |
|
|
โหลดเพลาอันดับ (กิโลกรัม) |
13000 |
|
วิธีการขึ้นรูปเพลา |
การประทับและการเชื่อม |
|
ที่อยู่อาศัยหน้าตัด (มม.) |
13515016 |
|
อัตราส่วนกล่องเกียร์ |
13.203/4.367 |
|
อัตราส่วนล้อ |
3.947 |
|
แรงบิดที่ได้รับการเสนอชื่อ/สูงสุด (NM) |
320/820 |
|
ได้รับการจัดอันดับ/พลังสูงสุด (kW) |
125/250 |
|
ความเร็วสูงสุด (รอบต่อนาที) |
11000 |
|
ขนาดมอเตอร์-มม.- |
φ354270 |
|
ระยะการติดตั้งสปริงใบไม้ (มม.) |
1040 |
|
ระยะการติดตั้งขอบ (มม.) |
พ.ศ. 2418 |
|
ความกว้างโดยรวม (มม.) |
2420 |
|
ข้อกำหนดเบรก |
กลองท่า/φ410220 |
|
ขนาดห้อง/ขนาดการเชื่อมต่อ (มม.) |
30/24 M161.5 |
|
แรงบิดเบรกสูงสุด (0.8MPA) |
218000nm |
|
ข้อกำหนดของกลอนล้อ |
2-10M221.5 |
|
สลักเกลียวของล้อมีการกระจายในเส้นผ่านศูนย์กลางวงกลม (มม.) |
φ335 |
|
ค้นหาจุดหยุด (มม.) |
φ280.8 |
|
น้ำหนักประกอบ (กก.) |
1030 |
description2
Pumbaa 125/250kW E-axle กลางสำหรับรถบรรทุกขยะไฟฟ้าและรถบรรทุกสปริงเกอร์
Pumbaa 125/250KW E-Axle กลางเป็นระบบขับเคลื่อนระบบขับเคลื่อนที่มีประสิทธิภาพสูงและมีวัตถุประสงค์เพื่อวัตถุประสงค์ที่สร้างขึ้นสำหรับยานพาหนะไฟฟ้าเชิงพาณิชย์เช่นรถบรรทุกขยะและรถสปริงเกอร์ ออกแบบมาเพื่อส่งมอบแรงบิดที่แข็งแกร่งการเร่งความเร็วที่ราบรื่นและประสิทธิภาพการใช้พลังงานที่ยอดเยี่ยมโซลูชันยานพาหนะไฟฟ้าเพลาขั้นสูงนี้ช่วยให้สะอาดยิ่งขึ้นเงียบลงและมีการบริการในเมืองที่ยั่งยืนยิ่งขึ้น
description2
พลังงานตรงกับความแม่นยำ
มีให้เลือกในการกำหนดค่า 125kW และ 250kW Pumbaa Central Exle รวมมอเตอร์ไฟฟ้าเกียร์และอินเวอร์เตอร์เข้ากับหน่วยขนาดกะทัดรัดเดียว ไม่ว่าจะใช้ในเลย์เอาต์เพลาล้อหลังหรือกึ่งกลางมันให้พลังงานและการควบคุมที่จำเป็นในการจัดการโหลดหนักและการขับรถหยุดและเดินทางบ่อยครั้งในสภาพแวดล้อมของเทศบาล
description2
ปรับให้เหมาะสมสำหรับ EVs เชิงพาณิชย์
สารละลายเพลาไฟฟ้ารถยนต์รุ่นต่อไปนี้ได้รับการออกแบบมาเพื่อทนต่อความต้องการที่เข้มงวดของการเก็บขยะทุกวันและการพ่นน้ำ ระบบแบบบูรณาการทำให้สถาปัตยกรรมยานพาหนะง่ายขึ้นและลดค่าใช้จ่ายในการบำรุงรักษาในขณะที่รองรับการเบรกแบบปฏิรูปและการกู้คืนพลังงานที่ดีขึ้น
description2
คุณสมบัติที่สำคัญ
มอเตอร์ไฟฟ้าที่มีประสิทธิภาพสูงพร้อมเอาต์พุตสูงถึง 250kW
การออกแบบแบบบูรณาการเพื่อการติดตั้งที่ง่ายและประหยัดพื้นที่
ความเข้ากันได้ด้านหลัง/mid-axle สำหรับเลย์เอาต์ยานพาหนะต่างๆ
เสียงรบกวนต่ำและการปล่อยก๊าซหางเป็นศูนย์
ระบบควบคุมอัจฉริยะพร้อมการวินิจฉัยแบบเรียลไทม์
อายุการใช้งานที่ยาวนานและลดต้นทุนการเป็นเจ้าของทั้งหมด
description2
เทคโนโลยีเพลา EV ราคาไม่แพงและปรับขนาดได้
กำลังมองหาราคาเพลาที่แข่งขันได้สำหรับการแปลงเพลา EV หรือการผลิต OEM หรือไม่? Pumbaa E-Axle มอบประสิทธิภาพพรีเมี่ยมในราคาที่ยอดเยี่ยมทำให้เป็นตัวเลือกที่เหมาะสำหรับการปรับใช้ EV Fleet เชิงพาณิชย์ขนาดใหญ่
description2
แอปพลิเคชัน
รถบรรทุกขยะ/ขยะ
สปริงเกลอร์น้ำและรถทำความสะอาดถนน
ยานพาหนะยูทิลิตี้เทศบาลความเร็วต่ำ
กองยาน EV Urban ที่ใช้งานหนัก
description2

Pumbaa PMEA40000Z การคำนวณการจำลอง E-axle กลางกลาง
- การคำนวณการออกแบบพารามิเตอร์
- การวิเคราะห์การตรวจสอบห่วงโซ่มิติ
- การวิเคราะห์การตรวจสอบการส่งสัญญาณ
- การศึกษาข้อผิดพลาดรูปร่างฟัน
Pumbaa PMEA40000Z ตัวอย่างแอปพลิเคชัน E-axle กลาง



หลักการทำงานและการจำแนกประเภทของระบบขับเคลื่อนไฟฟ้าของยานพาหนะไฟฟ้า
ยานพาหนะไฟฟ้ามีข้อดีของประสิทธิภาพสูงการปล่อยก๊าซเรือนกระจกเป็นมิตรต่อสิ่งแวดล้อมและสถานะการควบคุมจะไม่ได้รับผลกระทบจากโลกภายนอกและส่วนแบ่งของพวกเขาก็เพิ่มขึ้นเช่นกัน ยานพาหนะเชิงพาณิชย์ไฟฟ้ากำลังเกิดขึ้นในกระบวนการนี้ ความแตกต่างที่สำคัญระหว่างยานพาหนะไฟฟ้าและยานพาหนะสมัยใหม่แบบดั้งเดิมคือโหมดไดรฟ์ของยานพาหนะไฟฟ้าได้ถูกเปลี่ยนเป็นไดรฟ์ไฟฟ้า ระบบไดรฟ์ไฟฟ้าส่วนใหญ่แบ่งออกเป็นสี่ส่วน: มอเตอร์ไดรฟ์เกียร์ตัวแปลงพลังงานและคอนโทรลเลอร์ ระบบไดรฟ์ไฟฟ้าเป็นแกนหลักของยานพาหนะพลังงานใหม่ทั้งหมดซึ่งส่งผลโดยตรงต่อเศรษฐกิจความปลอดภัยความน่าเชื่อถือและประสิทธิภาพอื่น ๆ
1. ระบบไดรฟ์ไฟฟ้าเบื้องต้น
โครงสร้างของยานพาหนะพลังงานใหม่ส่วนใหญ่ประกอบด้วยระบบไดรฟ์ไฟฟ้าส่วนแชสซีโครงสร้างร่างกายและอุปกรณ์เสริมที่เกี่ยวข้องต่างๆ ยกเว้นระบบไดรฟ์ไฟฟ้าฟังก์ชั่นและองค์ประกอบโครงสร้างของส่วนที่เหลือโดยทั่วไปจะคล้ายกับของรถยนต์ทั่วไป แต่บางส่วนได้รับการปรับเปลี่ยนหรือเปลี่ยนใหม่เนื่องจากวิธีการขับเคลื่อนที่แตกต่างกัน องค์ประกอบและหลักการทำงานของระบบไดรฟ์ไฟฟ้าแสดงในรูปที่ 1 ซึ่งสามารถแบ่งออกเป็นสามส่วน: โมดูลเสริมโมดูลแหล่งจ่ายไฟออนบอร์ดและโมดูลหลักไดรฟ์ไฟฟ้า
2. การจำแนกประเภทเค้าโครงและลักษณะของระบบไดรฟ์ไฟฟ้า
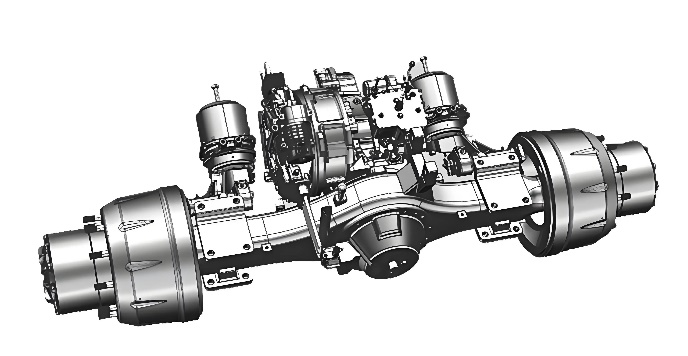
- ชุดประกอบไดรฟ์ไฟฟ้ากลางดังแสดงในรูปรวมมอเตอร์ไดรฟ์เข้ากับกล่องเกียร์แทนที่เครื่องยนต์และเกียร์ธรรมดา แต่ยังต้องใช้เพลาขับเช่นเดียวกับเพลาทั่วไป ในแง่ของการจัดเรียงมันคล้ายกับระบบส่งกำลังยานยนต์แบบดั้งเดิม ยิ่งไปกว่านั้นเส้นทางการส่งสัญญาณมีความยาวการสูญเสียพลังงานมีขนาดใหญ่และประสิทธิภาพของระบบต่ำ พื้นที่ด้านล่างถูกครอบครองในปริมาณมากซึ่งทำให้ยากต่อการจัดเรียงแบตเตอรี่พลังงาน ตัวอย่างเช่นชุดประกอบไดรฟ์ไฟฟ้ากลางของประเภท Cetrax ที่ผลิตโดย ZF Friedrichshafen AG ในประเทศเยอรมนีดังแสดงในรูปที่ 3 เหมาะสำหรับรถบัสแนวราบและสูง จากวิธีการออกแบบ "ปลั๊กแอนด์ไดรฟ์" Cetrax สามารถรวมเข้ากับแพลตฟอร์มยานพาหนะปัจจุบันโดยไม่ต้องมีการเปลี่ยนแปลงครั้งใหญ่กับแชสซีเพลาหน้าและด้านหลังหรือส่วนต่าง เอาต์พุตสูงสุดและแรงบิดสูงสุดคือ 300 kW และ 4 400 nm ตามลำดับ
- transaxle ไฟฟ้าแบบรวม (แกนขนาน/โคแอกเซียล/แนวตั้ง) แสดงในแผนภาพและรวม transaxle ทั่วไปเข้ากับมอเตอร์ไฟฟ้าซึ่งจะชะลอตัวและเพิ่มขึ้นและเพิ่มขึ้นโดยตรงเพื่อขับเคลื่อนล้อ ช่วยประหยัดเพลาส่งก่อนหน้า, ตัวยึดช่วงล่างและชิ้นส่วนอื่น ๆ ซึ่งทำให้ค่าใช้จ่ายในการโหลดต่ำ ประสิทธิภาพการส่งผ่านสูง มันมีพื้นที่น้อยลงและสะดวกกว่าสำหรับเค้าโครงของชุดแบตเตอรี่พลังงาน และมีประสิทธิภาพน้อยลงในแง่ของ NVH; มวลที่ไม่ได้มีขนาดใหญ่และชดเชยและความคล่องแคล่วของยานพาหนะทั้งหมดไม่สูง ตัวอย่างเช่นเพลาไดรฟ์แบบรวมสองสปีดของแบบจำลองของ QT130SPE ที่ผลิตโดย Qingte Group Co. , Ltd. ดังแสดงในรูปที่ 5 เหมาะสำหรับรถแทรกเตอร์ 49T ที่มีโหลดที่ 13 ตัน รูปแบบการเปลี่ยนขอบแม่เหล็กคู่ทำให้การเปลี่ยนเกียร์ราบรื่นและประสบการณ์การขับขี่ที่น่าพอใจยิ่งขึ้น การรวมระบบแบบดั้งเดิมจะปล่อยพื้นที่แชสซีอย่างมีประสิทธิภาพและให้ความสามารถในการผ่านได้ดีขึ้น

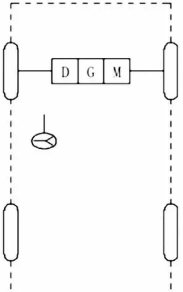
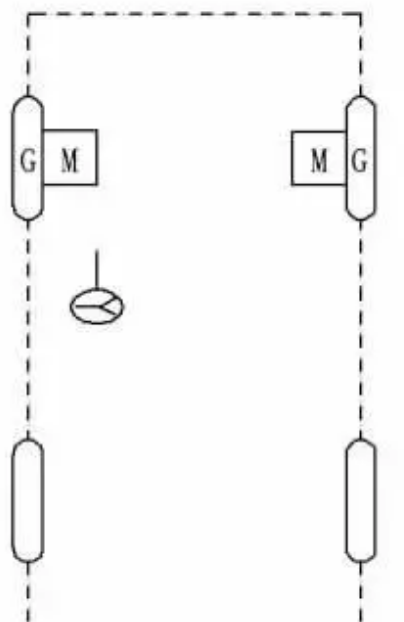
- ดังที่แสดงในรูปมอเตอร์แบบบูรณาการตัวลดและเพลาไดรฟ์แบบดั้งเดิมจะยกเลิกเพลาส่งและความแตกต่างและประสิทธิภาพการส่งผ่านสูงเนื่องจากมีการส่งผ่านทางอิเล็กทรอนิกส์ และมันมีพื้นที่น้อยลงและเค้าโครงแบตเตอรี่พลังงานก็สะดวกกว่า อย่างไรก็ตามมวล unsprung มีขนาดใหญ่ซึ่งไม่ดีสำหรับการจัดการยานพาหนะทั้งหมดและการควบคุมความแตกต่างทางอิเล็กทรอนิกส์นั้นยาก ดังที่แสดงในรูปที่ 7 ประเภทมอเตอร์ใช้มอเตอร์แบบอะซิงโครนัสซึ่งใช้กับรถบัส 10 m ~ 18 m พลังงานสูงสุดคือ 2 × 125 kW มวลโหลดเพลาสูงสุดคือ 13,000 กิโลกรัมและอินเวอร์เตอร์คอนโทรลเลอร์ไม่รวมอยู่บนเพลา
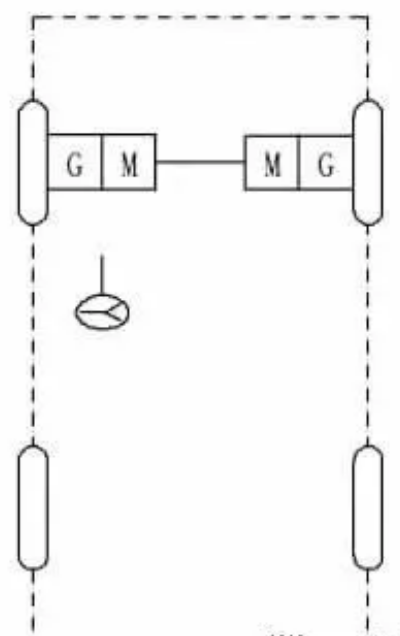
- ดังที่แสดงในรูปที่ 8 ชิ้นส่วนมอเตอร์ในวงล้อนั้นถูกรวมเข้ากับไฟล์ขับเพลาส่วน [1] และมอเตอร์ไดรฟ์ขับเคลื่อนล้อโดยตรงคือทิศทางการพัฒนาในอนาคต ระบบไดรฟ์นี้มีประสิทธิภาพการส่งผ่านสูงสุดและมีข้อดีของน้ำหนักเบาและการใช้พลังงานต่ำ ประสิทธิภาพการกู้คืนพลังงานเบรกใกล้เคียงกับ 100%แต่ค่าใช้จ่ายสูง เมื่อขนาดมอเตอร์มีขนาดใหญ่มีปัญหาเช่นความร้อนสูงเกินไปการล้างอำนาจแม่เหล็กและระบบห่วงโซ่อุตสาหกรรมและในปัจจุบันเทคโนโลยีในพื้นที่นี้ยังไม่เติบโต ตัวอย่างเช่นเพลาขับเคลื่อนไฟฟ้าในวงล้อที่ผลิตโดย E-traction ของ บริษัท ดัตช์ดังแสดงในรูปที่ 9 มีการปล่อยมลพิษเป็นศูนย์ต้นทุนการเป็นเจ้าของต่ำและประสิทธิภาพสูงถึง 94% จากแบตเตอรี่ไปยังล้อซึ่งสูงกว่าระบบไดรฟ์ไฟฟ้าธรรมดา 15% และลดชิ้นส่วนที่เคลื่อนไหว ช่วงเพิ่มขึ้น 20% และขนาดแบตเตอรี่จะลดลง 20% ง่ายต่อการบำรุงรักษาเสียงรบกวนต่ำความสะดวกสบายสูงและความซ้ำซ้อนสูงการควบคุมล้ออิสระมีพื้นที่ขนาดเล็กการใช้พื้นที่สูงและโหมดควบคุมที่ยืดหยุ่นซึ่งเหมาะสำหรับรถบัสและรถบรรทุก 12 m ~ 18 m และมีแอพพลิเคชั่นที่หลากหลาย
ในปัจจุบันระบบไดรฟ์ไฟฟ้าทั่วไปสำหรับยานพาหนะเชิงพาณิชย์พลังงานใหม่ส่วนใหญ่เป็นระบบขับเคลื่อนไฟฟ้าแบบบูรณาการส่วนกลางเพลาขับเคลื่อนไฟฟ้าด้านข้างล้อและเพลาขับเคลื่อนไฟฟ้าแบบบูรณาการ เพลาไดรฟ์ไฟฟ้าโคแอกเซียลแบบบูรณาการจากส่วนกลางใช้สำหรับรถบรรทุกขนาดกลางและหนักรวมถึงรถดั๊มพอดีตัวกว้าง transaxles ไฟฟ้าด้านล้อมักจะใช้ในชุดรถบัสมากกว่า 10 เมตร เพลาขับเคลื่อนไฟฟ้าแบบรวมมักใช้ในรถบรรทุกและซีรีย์มินิบัส 6 ม. ~ 7 M เพลาขับเคลื่อนไฟฟ้าแบบรวมแบ่งออกเป็นสามรูปแบบ: แกนขนานแกนโคแอกเซียลและแนวตั้ง ในหมู่พวกเขามอเตอร์ไดรฟ์ของเพลาไดรฟ์ไฟฟ้าแบบรวมแกนแนวตั้งเชื่อมต่อและขับเคลื่อนโดยเพลาขับที่มุมตั้งฉากและโหมดการลดเกียร์ไฮเปอร์โบลด์ถูกนำมาใช้อัตราส่วนความเร็วมีขนาดเล็กและความหนาแน่นของพลังงานของระบบต่ำ เพลาขนานนั้นรวมกับเพลาขับเคลื่อนไฟฟ้ามอเตอร์และเพลาไดรฟ์จะถูกจัดเรียงในสถานะคู่ขนานและมอเตอร์เป็นหลายออฟเซ็ต การส่งเกียร์ทรงกระบอกส่วนใหญ่อัตราส่วนความเร็วสูงความหนาแน่นพลังงานสูง เนื่องจากมวลและชดเชยขนาดใหญ่และการชดเชยการจัดการและความสะดวกสบายของยานพาหนะทั้งหมดจึงไม่ดี เพลาไดรฟ์ไฟฟ้าแบบบูรณาการในประเทศส่วนใหญ่ใช้ประเภทเพลาขนาน
เมื่อเปรียบเทียบกับระบบไดรฟ์กลางเพลาขับเคลื่อนไฟฟ้าแบบบูรณาการมีระดับการรวมในระดับสูงในแง่ของมอเตอร์ตัวลดความแตกต่างและเพลา การออกแบบและควบคุมการส่งสัญญาณอัตโนมัติและเทคโนโลยีการควบคุมของระบบไดรฟ์ไฟฟ้านั้นยาก แชสซีใช้พื้นที่เล็ก ๆ และการจัดเรียงแบตเตอรี่สะดวก มันสามารถบรรลุการกู้คืนพลังงานสูงน้ำหนักเบา 10% ~ 25% ต่ำกว่าไดรฟ์กลางลดการใช้พลังงานความเร็วมอเตอร์สูงขนาดเล็กและความหนาแน่นพลังงานสูง อย่างไรก็ตามมอเตอร์และเกียร์อยู่ภายใต้ช่วงล่างและมวลที่ไม่ได้มีขนาดใหญ่ซึ่งไม่เอื้อต่อการปรับปรุงการจัดการยานพาหนะและความสะดวกสบาย เป็นการยากที่จะพัฒนาการออกแบบและควบคุมการส่งสัญญาณอัตโนมัติเทคโนโลยีการควบคุมระบบไดรฟ์ไฟฟ้าและเพลาขับยานพาหนะเชิงพาณิชย์ มอเตอร์และเกียร์ของระบบไดรฟ์กลางอยู่เหนือช่วงล่างและมวลที่ไม่ได้มีขนาดเล็กและการจัดการยานพาหนะและความสะดวกสบายสูง เป็นการยากที่จะออกแบบและควบคุมการส่งสัญญาณอัตโนมัติและพัฒนาเทคโนโลยีการควบคุมสำหรับระบบไดรฟ์ไฟฟ้า
3. แนวโน้มการพัฒนาของรถบรรทุกหนักพลังงานใหม่
ด้วยการพัฒนาและการวิจัยของรถบรรทุกหนักพลังงานใหม่ในอุตสาหกรรมโดยพิจารณาจากปัจจัยหลักเช่นเศรษฐกิจการบูรณาการและความปลอดภัยรวมกับแนวโน้มการพัฒนาในอนาคตของระบบขับเคลื่อนไฟฟ้าที่มีน้ำหนักเบาความเร็วสูงมีประสิทธิภาพสูงความน่าเชื่อถือสูงและ NVH ที่ดีรถบรรทุกหนักพลังงานใหม่ส่วนใหญ่รวมถึงแง่มุมต่อไปนี้
1) ต้นทุนการผลิตต่ำและต้นทุนการบำรุงรักษาต่ำ ในการใช้รถบรรทุกหนักพลังงานใหม่ทุกวันการชาร์จกองการบำรุงรักษายานพาหนะและอายุการใช้งานแบตเตอรี่ต้องใช้เงินลงทุนจำนวนหนึ่ง เพื่อให้แน่ใจว่าข้อกำหนดทางเศรษฐกิจการแสวงหาต้นทุนที่ลดลงและค่าบำรุงรักษาเป็นหนึ่งในเป้าหมายหลักของการส่งเสริมยานพาหนะพลังงานใหม่
2) น้ำหนักตัวเบาและโมดูลาร์ของระบบควบคุมอิเล็กทรอนิกส์ ยิ่งมวลของตัวเองมากเท่าใดการใช้พลังงานของแบตเตอรี่ก็ยิ่งสูงขึ้นในระหว่างการทำงาน ระบบไดรฟ์ไฟฟ้าต้องการส่วนประกอบที่ซับซ้อนมากขึ้นในการควบคุมและ modularity เป็นวิธีที่จะทำลายระบบที่ซับซ้อนให้เป็นโมดูลที่สามารถจัดการได้ดีขึ้น ในขณะที่การเพิ่มน้ำหนักเบาและปรับโครงสร้างของตัวเอง แต่ก็จำเป็นที่จะต้องตอบสนองความต้องการความแข็งแรงและปรับปรุงอัตราการใช้วัตถุดิบ ทำให้ความเร็วสูงและลดแรงบิดของมอเตอร์ ประสิทธิภาพสูงลดการใช้พลังงานของยานพาหนะทั้งหมด
3) ระดับการปีนเขาที่ใหญ่ขึ้นและประสิทธิภาพการใช้พลังงานที่แข็งแกร่ง พลังงานที่ระบบไดรฟ์ไฟฟ้าสามารถจัดหาได้นั้นถูก จำกัด ด้วยปัจจัยเช่นพลังงานมอเตอร์และขนาดแบตเตอรี่ รถบรรทุกหนักมีมวลที่หนักกว่าและมีความสามารถในการรับน้ำหนักที่สูงขึ้นและมักจะขาดพลังงานเมื่อปีนเขาและสภาพถนนที่ไม่ดี (โคลนหลุมบ่อ ฯลฯ )
4) การใช้พลังงานต่ำและความน่าเชื่อถือสูง ช่วงการล่องเรือเป็นหนึ่งในตัวชี้วัดประสิทธิภาพที่สำคัญของยานพาหนะพลังงานใหม่และเป็นสิ่งสำคัญอย่างยิ่งในการดำเนินงานของรถบรรทุกหนักพลังงานใหม่ ปริมาณของไมล์สะสมที่เหลือและการใช้พลังงานภายใต้สภาพถนนที่ซับซ้อนล้วนเป็นข้อกำหนดที่สูงขึ้นเพื่อความน่าเชื่อถือ การศึกษาสเปกตรัมในเชิงลึกจะดำเนินการเพื่อระบุส่วนประกอบที่สิ้นเปลืองและเพิ่มอายุการใช้งานของระบบโดยรวม เสริมสร้างความสามารถในการวิเคราะห์การจำลองและการตรวจสอบการทดสอบภายใต้สภาพการทำงานที่รุนแรง
5) ประสบการณ์การขับขี่ที่ดี ใช้ความหนาแน่นและแรงบิดสูงเพื่อให้เกิดการเร่งความเร็วที่ดีขึ้นสภาพถนนที่ซับซ้อนการขึ้นเนินและการแซงหน้าประสิทธิภาพ เพิ่มประสิทธิภาพ NVH ของระบบไดรฟ์ไฟฟ้าเองเพื่อปรับปรุงคุณภาพ NVH ของยานพาหนะทั้งหมด
4. การรวมกัน
โดยสรุปแล้วจะมีการแนะนำหลักการทำงานการจำแนกประเภทและผลิตภัณฑ์เฉพาะของไดรฟ์ไฟฟ้าและรูปแบบการกำหนดค่าและการใช้งานของระบบไดรฟ์ไฟฟ้าในขั้นตอนนี้มีการอธิบายสั้น ๆ ด้วยการพัฒนาอย่างค่อยเป็นค่อยไปของยานพาหนะไฟฟ้าการปรับปรุงและการทำซ้ำของผลิตภัณฑ์ต่ำสุดได้ปรับปรุงประสิทธิภาพการส่งผ่านประสิทธิภาพการส่งผ่านและช่วงการล่องเรือซึ่งทำให้การส่งสัญญาณหลายความเร็วกลายเป็นแนวโน้มการพัฒนาของระบบส่งสัญญาณไฟฟ้าในอนาคต ในแง่ของยานพาหนะไฟฟ้าและยานพาหนะเชิงพาณิชย์รูปแบบหลักของระบบขับเคลื่อนไฟฟ้าคือเพลาขับเคลื่อนไฟฟ้าด้านข้างล้อเพลาขับเคลื่อนไฟฟ้าแบบรวมและชุดไดรฟ์ไฟฟ้ากลาง รถยนต์โดยสารส่วนใหญ่ใช้เพลาขับเคลื่อนไฟฟ้าล้อรถบรรทุกส่วนใหญ่ใช้เพลาขับเคลื่อนไฟฟ้าแบบบูรณาการหรือชุดไดรฟ์กลางและรถบรรทุกหนักเหมาะสำหรับรูปแบบของเพลาขับเคลื่อนไฟฟ้าแบบบูรณาการหรือชุดไดรฟ์กลาง หลังจากการเปรียบเทียบเพื่อให้เป็นไปตามข้อกำหนดด้านประสิทธิภาพที่สูงขึ้นและบรรลุผลประโยชน์ทางเศรษฐกิจที่ดีขึ้นโครงการระบบขับเคลื่อนไฟฟ้าโดยใช้การกำหนดค่าโดยรวมของมอเตอร์ความเร็วสูงและกล่องเกียร์หลายสปีดนั้นสอดคล้องกับแนวโน้มการพัฒนาในอนาคต
ฝากข้อความของคุณ
บล็อก

ตัวควบคุม "มัลติ-อิน-วัน": เจาะลึกการบูรณาการสำหรับรถยนต์พลังงานใหม่

The Core of Permanent Magnet Motors: A Complete Analysis of the Pros and Cons of Four Major PM Rotor Topologies – How to Correctly "Arrange Your Troops"

Deutsche EV-Fahrer: So gewinnen Sie bis zu 120 km Winterreichweite durch eine 0,1-mm-Einstellung zurück
