








Pumbaa 125/250kW E-axle กลาง (ด้านหลัง/mid-axle) สำหรับรถแทรกเตอร์ไฟฟ้า
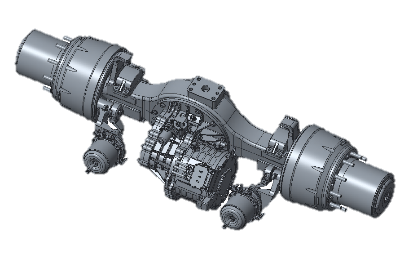

Pumbaa 125/250kW E-axle กลาง (ด้านหลัง/mid-axle) สำหรับรถแทรกเตอร์ไฟฟ้า
Pumbaa PMEA40000Z E-axle กลาง (ด้านหลัง/mid-axle) พารามิเตอร์ทางเทคนิค
|
โหลดเพลาอันดับ (กิโลกรัม) |
13000 |
|
วิธีการขึ้นรูปเพลา |
การประทับและการเชื่อม |
|
ที่อยู่อาศัยหน้าตัด (มม.) |
135 × 150 × 16 |
|
อัตราส่วนกล่องเกียร์ |
13.203/4.367 |
|
อัตราส่วนล้อ |
3.947 |
|
แรงบิดที่ได้รับการเสนอชื่อ/สูงสุด (NM) |
320/820 |
|
ได้รับการจัดอันดับ/พลังสูงสุด (kW) |
125/250 |
|
ความเร็วสูงสุด (รอบต่อนาที) |
11000 |
|
ขนาดมอเตอร์ (มม.) |
φ354× 270 |
|
ระยะการติดตั้งสปริงใบไม้ (มม.) |
1040 |
|
ระยะการติดตั้งขอบ (มม.) |
พ.ศ. 2418 |
|
ความกว้างโดยรวม (มม.) |
2420 |
|
ข้อกำหนดเบรก |
Drum Pose/φ410× 220 |
|
ขนาดห้อง/ขนาดการเชื่อมต่อ (มม.) |
30/24 M16 × 1.5 |
|
แรงบิดเบรกสูงสุด (0.8MPA) |
2 × 18000nm |
|
ข้อกำหนดของกลอนล้อ |
2-10 × M22 × 1.5 |
|
สลักเกลียวของล้อมีการกระจายในเส้นผ่านศูนย์กลางวงกลม (มม.) |
φ335 |
|
ค้นหาจุดหยุด (มม.) |
φ280.8 |
|
น้ำหนักประกอบ (กก.) |
1030 |
description2
พลังสูงการควบคุมอัจฉริยะ
ด้วยตัวเลือกการส่งออก 125kW และ 250kW Pumbaa Central Exle ตรงตามข้อกำหนดด้านพลังงานที่ต้องการของเครื่องจักรเกษตรไฟฟ้าในขณะที่ยังคงรักษาประสิทธิภาพการใช้พลังงาน การรวมมอเตอร์อัจฉริยะและอินเวอร์เตอร์ให้การส่งแรงบิดที่ราบรื่นการเบรกแบบปฏิรูปและการวินิจฉัยแบบเรียลไทม์-ช่วยให้คุณทำงานได้อย่างแม่นยำและควบคุม
description2
เหมาะสำหรับยานพาหนะเกษตรไฟฟ้า
ไม่ว่าคุณจะกำลังสร้างรถแทรกเตอร์ไฟฟ้าใหม่หรืออัพเกรดระบบไฮบริด Pumbaa E-Axle ให้โซลูชันระบบขับเคลื่อนพร้อมในอนาคต มันทำงานได้อย่างราบรื่นกับสถาปัตยกรรม EV ที่ทันสมัยและเข้ากันได้กับช่วงของแบตเตอรี่และระบบควบคุม
description2
คุณสมบัติที่สำคัญ
มอเตอร์ไฟฟ้าที่มีเอาท์พุทสูงพร้อมกำลังสูงสุด 250kW
เกียร์แบบบูรณาการมอเตอร์และอินเวอร์เตอร์ในหน่วยขนาดกะทัดรัดเดียว
ได้รับการปรับให้เหมาะสมสำหรับรถแทรกเตอร์ไฟฟ้าและ EV แบบออฟโรด
รองรับการติดตั้งทั้งด้านหลังและกลางเพลา
การก่อสร้างที่ขรุขระสำหรับสภาพแวดล้อมการทำงานที่รุนแรง
การบำรุงรักษาต่ำและการปล่อยมลพิษเป็นศูนย์
description2
แอปพลิเคชัน
รถแทรกเตอร์ไฟฟ้าและผู้เก็บเกี่ยว
ยานพาหนะขนส่งทางการเกษตร
อุปกรณ์ก่อสร้างและเหมืองแร่
ออฟโรดและ EVS พิเศษ
description2
ตัวอย่างแอปพลิเคชัน PUMBAA PMEA40000Z CENTRAL EAXLE (ด้านหลัง/mid-Axle)
แบทช์ขนาดเล็กถูกใช้ในรถบรรทุกหนัก Sany, Baidu Commercial Vehicle (Deepway), Foton Daimler, Zero One Smart การ์ด ฯลฯ
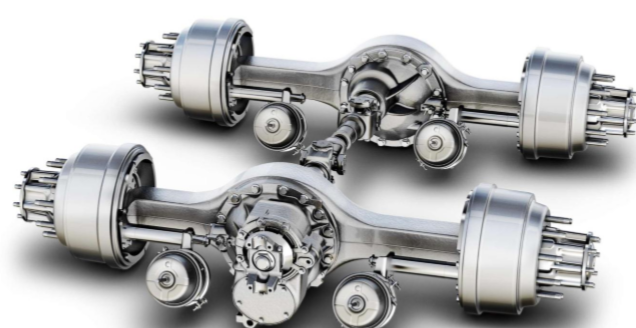
 Matching vehicle type tractor.png)
 Matching vehicle type tractor1.png)
 Matching vehicle type tractor2.png)
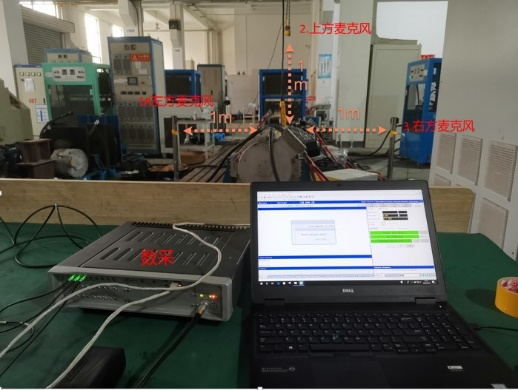
การทดสอบอี-เพลากลาง

การทดสอบเสียงรบกวนของบัลลังก์สะพานไฟฟ้า

การทดสอบความทนทานของม้านั่งสะพานไดรฟ์ไฟฟ้า

การทดสอบความหนาแน่นของอากาศ

การทดสอบการสั่นสะเทือนของแพลตฟอร์มสะพานไฟฟ้า

การทดสอบการโหลดลูกค้า
ความรู้เบื้องต้นเกี่ยวกับโครงสร้างเพลาและแนวโน้มการพัฒนาของเพลาขับเคลื่อนไฟฟ้า
1. คำจำกัดความและโครงสร้างของเพลา
1. ภาพรวมของเพลา
เครื่องยนต์กระปุกเกียร์และเพลาเป็นชุดแกนกลางหลักสามชุดที่สำคัญของรถบรรทุกแม้ว่าเพลามักจะถูกกล่าวถึงเช่นเครื่องยนต์และกระปุกเกียร์ แต่มันมีบทบาทในกระบวนการทำงานของยานพาหนะและมีบทบาทสำคัญในพลังการขับขี่และความเสถียรของยานพาหนะ ในฐานะหนึ่งในสี่ชุดหลักของรถบรรทุกหนัก (ห้องโดยสาร, เครื่องยนต์, เกียร์, เพลา), ระดับอุตสาหกรรมและการพัฒนาทางเทคนิคของเพลารถบรรทุกหนักมีความสัมพันธ์กับการพัฒนาอุตสาหกรรมรถบรรทุกหนักในระดับหนึ่ง
2. ฟังก์ชั่นพื้นฐานของเพลา
ฟังก์ชั่นของเพลาคือการส่งแรงและแรงบิดในทุกทิศทางระหว่างเฟรม (หรือร่างกายที่รับน้ำหนัก) และล้อซึ่งมีผลกระทบที่สำคัญต่อการเปลี่ยนแปลงความเสถียรความสามารถในการรับแบริ่งและคุณสมบัติอื่น ๆ ของรถยนต์

1) แรงบิดของเครื่องยนต์ที่ส่งโดยอุปกรณ์ส่งสัญญาณสากลจะถูกส่งไปยังล้อขับผ่านตัวลดสุดท้าย, เพลาครึ่งเพลา ฯลฯ เพื่อลดความเร็วและเพิ่มแรงบิด
2) เปลี่ยนทิศทางการส่งแรงบิดผ่านคู่เฟืองมุมของตัวลดสุดท้าย
3) ผลกระทบที่แตกต่างกันของล้อทั้งสองด้านได้รับการรับรู้ผ่านความแตกต่างเพื่อให้แน่ใจว่าล้อด้านในและด้านนอกจะถูกนำไปใช้ด้วยความเร็วที่แตกต่างกัน
4) ผ่านการส่งเกียร์ตัวลดสุดท้ายความเร็วจะลดลงและแรงบิดจะเพิ่มขึ้น
5) ผ่านที่อยู่อาศัยเพลาและล้อฟังก์ชั่นการส่งแบริ่งและแรงถูกรับรู้
3. การตั้งชื่อของเพลา
ตามกฎของอุตสาหกรรมเส้นผ่านศูนย์กลางของวงกลมพิทช์เฟืองมุมแบบพาสซีฟในส่วนต่างมักใช้เป็นชื่อของเพลาขับ 435, 457, 460, 485, 300 และอื่น ๆ ตัวเลขเหล่านี้อ้างถึงเส้นผ่านศูนย์กลางของเกียร์เบลเวลล์พาสซีฟ
นอกจากนี้ยังมีทั่วไปเช่น 140, 153 Bridge ฯลฯ ซึ่งหมายถึงเส้นผ่านศูนย์กลางของอุปกรณ์เอียงแบบพาสซีฟ 153 จริง ๆ แล้วเป็นแบบจำลองของ Dongfeng และสะพานที่ติดตั้งบนมันถูกเรียกว่า 153 Bridge และเรียกว่า 435 Bridge ตามเส้นผ่านศูนย์กลางของเกียร์บนรถปลดปล่อย
4. การแบ่งประเภทของเพลา
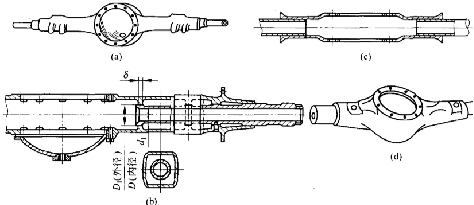
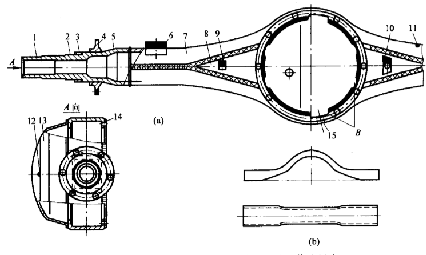
1) ตามโครงสร้างที่อยู่อาศัยเพลาที่แตกต่างกันเพลาจะถูกแบ่งออกเป็นอินทิกรัลและตัดการเชื่อมต่อสอง:
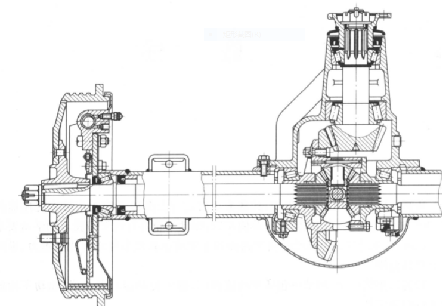
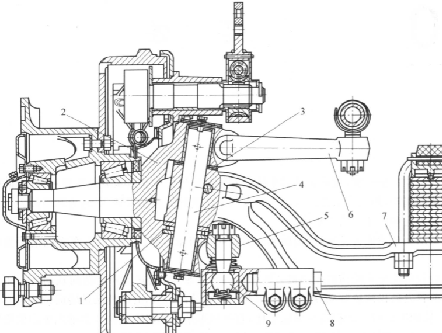
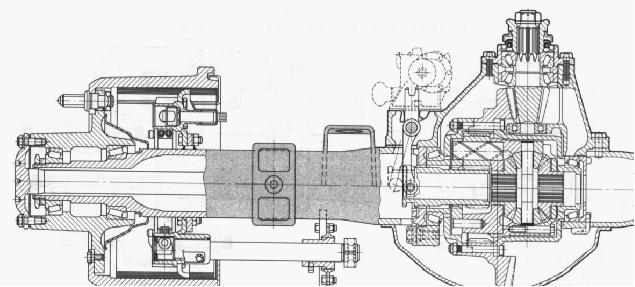
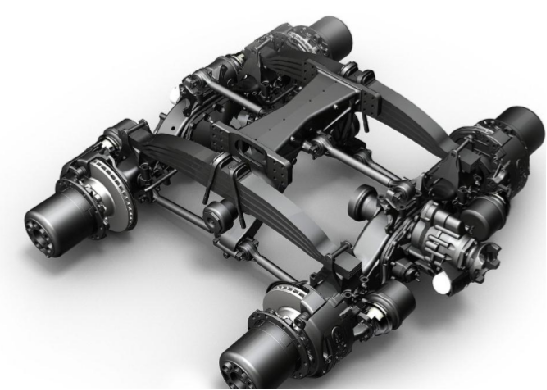
เพลาอินทิกรัล: ลำแสงกลวงที่แข็งทุติยภูมิประกอบด้วยชิ้นส่วนเช่นปลอกเพลาครึ่งส่วนส่วนตรงกลางและท่อเพลาที่ปลายทั้งสองและตัวลดสุดท้าย, เพลาและครึ่งเพลาและชิ้นส่วนอื่น ๆ ถูกติดตั้งในลำแสงกลวงและเพลาชนิดนี้เรียกว่าเพลาอินทิกรัล
Transaxle ทั้งหมดคล้ายกับ Barbell ยักษ์ที่รองรับร่างกายโดยระบบกันสะเทือน ล้อและครึ่งแกนทั้งสองด้านไม่สามารถเคลื่อนที่ได้เมื่อเทียบกับกันในระนาบตามขวางดังนั้นเพลาเสาหินจึงมักจะถูกผสมพันธุ์กับสารแขวนลอยที่ไม่ได้เป็นอิสระ เนื่องจากวิธีการผลิตที่แตกต่างกันทำให้ตัวเรือนเพลาอินทิกรัลสามารถแบ่งออกเป็นประเภทการหล่อแบบอินทิกรัลการหล่อส่วนกลางกดลงในประเภทท่อเหล็กและการปั๊มแผ่นเหล็กและการเชื่อม เนื่องจากประสิทธิภาพที่ดีและความแข็งที่ดีการรับน้ำหนักขนาดใหญ่โครงสร้างที่เรียบง่ายและการทำงานที่เชื่อถือได้ทำให้ส่วนที่อยู่อาศัยของเพลาอินทิกรัลส่วนใหญ่ใช้กันอย่างแพร่หลายในรถบรรทุกและรุ่นอื่น ๆ และรุ่นออฟโรดส่วนใหญ่ก็ใช้
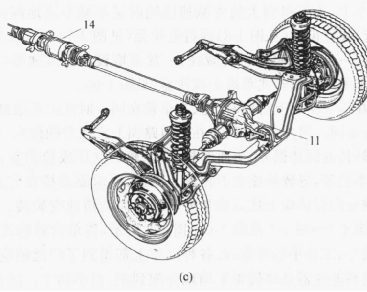
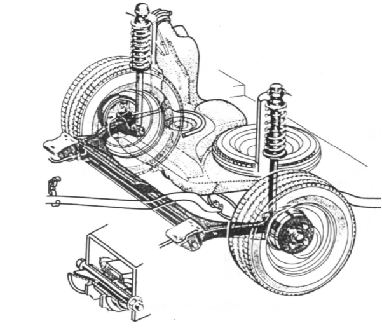
◆เพลาที่เชื่อมต่อ: เพลาขับที่เชื่อมต่อไม่มีเปลือกแบบอินทิกรัลหรือลำแสงที่เชื่อมต่อกับล้อขับซ้ายและขวาและที่อยู่อาศัยเพลาของมันถูกแบ่งส่วนและสามารถทำการเคลื่อนไหวสัมพัทธ์กับกันและกันและมักจะใช้ระบบกันสะเทือนอิสระ ล้อไดรฟ์ทั้งสองด้านเชื่อมต่อกับเฟรมโดยระบบกันสะเทือนแบบยืดหยุ่นและทั้งสองล้อสามารถเคลื่อนที่ได้อย่างอิสระจากกันเมื่อเทียบกับเฟรม ตัวลดขั้นสุดท้ายมักจะถูกแขวนไว้บนเฟรม (หรือร่างกาย) และเพลาส่งผ่านบานพับผ่านข้อต่อสากลและเพลาส่งกำลังบานพับกับล้อขับผ่านข้อต่อสากลและเพลาไดรฟ์นี้เรียกว่าเพลาขับเคลื่อนการเชื่อมต่อ
เนื่องจากมวลที่ไม่ได้รับการคัดเลือกต่ำของเพลาที่ถูกตัดการเชื่อมต่อและโดยทั่วไปให้ความร่วมมือกับการระงับอิสระที่ซับซ้อนจึงมีความสามารถในการปรับตัวได้ดีกับภูมิประเทศดังนั้นจึงเป็นเรื่องธรรมดามากในรถที่มีความต้องการสูงสำหรับการขับขี่ยานพาหนะที่ราบรื่นและโดยทั่วไปแล้วรถบรรทุกทหารจะถูกใช้ในข้อกำหนดนอกถนน

2) ตามฟังก์ชั่นที่แตกต่างกันของเพลาเพลาแบ่งออกเป็นสองประเภท: เพลาขับและเพลาขับ:
◆เพลาขับ: นั่นคือเพลาที่ไม่ได้ขับเคลื่อนหรือที่เรียกว่าเพลาเชื่อมต่อกับเฟรมหรือร่างกายที่รับน้ำหนักผ่านระบบกันสะเทือนและล้อที่ขับเคลื่อนด้วยทั้งสองด้าน
เพลาพวงมาลัย: ล้อสามารถนำพารถทั่วไปส่วนใหญ่จะเป็นเพลาหน้าสำหรับเพลาพวงมาลัยโครงสร้างของเพลาพวงมาลัยนั้นเหมือนกันส่วนใหญ่ประกอบด้วยคานด้านหน้า, สนับมือพวงมาลัย, kingpin และศูนย์กลางล้อ

Support Bridge: คล้ายกับโครงสร้างเพลาพวงมาลัยมันไม่มีฟังก์ชั่นพวงมาลัยและมีบทบาทเฉพาะเท่านั้น เพลากลางหรือด้านหลังของรถยนต์สามเพลาที่ขับเคลื่อนด้วยเพลาเดี่ยว (รถยนต์ 6 × 2) เป็นสะพานรองรับและเพลาบนรถพ่วงเป็นสะพานรองรับ
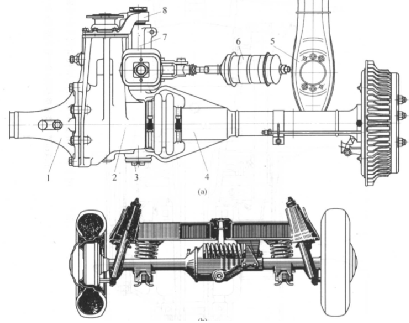
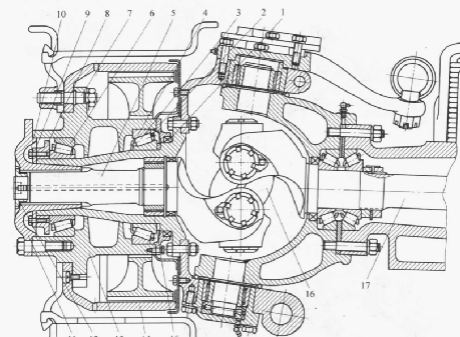
◆ไดรฟ์เพลา: ส่งพลังงานและกระจายแรงบิดไปที่ปลายทั้งสองของล้อและในเวลาเดียวกันก็สามารถแบกแรงและช่วงเวลาต่าง ๆ ระหว่างเฟรมหรือร่างกายและพื้นผิวถนน ในรุ่นทั่วไปเพลาไดรฟ์ประกอบด้วยตัวลดขั้นสุดท้ายความแตกต่างอุปกรณ์ส่งสัญญาณและตัวเรือนเพลา
เพลาขับเคลื่อนพวงมาลัย: เพลาไดรฟ์ที่มีฟังก์ชั่นพวงมาลัยเป็นเรื่องธรรมดาในรถยนต์และโดยทั่วไปแล้วรถบรรทุกจะใช้ในรุ่นไดรฟ์ทุกล้อ
เมื่อเปรียบเทียบกับเพลาพวงมาลัยคานด้านหน้าจะถูกแทนที่ด้วยตัวเรือนเพลากลวงและส่วนประกอบต่าง ๆ เช่นตัวลดสุดท้ายเพลาขับและข้อต่อสากลจะถูกเพิ่มเข้ามาเพื่อส่งกำลัง

5. ทิศทางการพัฒนาแกน
ในฐานะที่เป็นศูนย์กลางของยานพาหนะความสำคัญของเพลาได้รับความสนใจมากขึ้นเรื่อย ๆ และการพัฒนาวิทยาศาสตร์และเทคโนโลยีอย่างรวดเร็วจะนำไปสู่เพลาเพื่อพัฒนาในทิศทางต่อไปนี้:
(1) การแยกส่วน: ในการออกแบบโครงสร้างเพลาควรได้รับการพัฒนาในทิศทางของ "มาตรฐานของชิ้นส่วนการวางโครงสร้างทั่วไปและการทำให้เป็นอนุกรมผลิตภัณฑ์" และส่วนทั่วไปหลายส่วนควรใช้รูปแบบและการผลิตที่แตกต่างกันเพื่อจับคู่โมเดลที่แตกต่างกัน
(2) น้ำหนักเบา: ด้วยการแนะนำนโยบายการชาร์จน้ำหนักและภาษีน้ำมันเชื้อเพลิงน้ำหนักเบาได้กลายเป็นแนวโน้มสำคัญในการพัฒนารถบรรทุก เพลาควรได้รับการปรับให้เหมาะสมโดยใช้วัสดุใหม่และการออกแบบโครงสร้างเช่นดิสก์เบรก, ตัวเรือนเพลาที่ประทับตราและเชื่อม ฯลฯ ในขณะที่ให้ความแข็งแรงและความแข็งแกร่งเพียงพอ
(3) เสียงรบกวนต่ำ: ด้วยการจัดหาความเร็วอินพุตและความเร็วยานพาหนะ NVH ได้กลายเป็นตัวบ่งชี้สำคัญของเพลา มาตรการต่าง ๆ เช่นการปรับปรุงความแม่นยำในการตัดเฉือนและความแม่นยำในการประกอบของชิ้นส่วนและเพิ่มความแข็งเพื่อลดเสียงรบกวนของการทำงานของเพลา
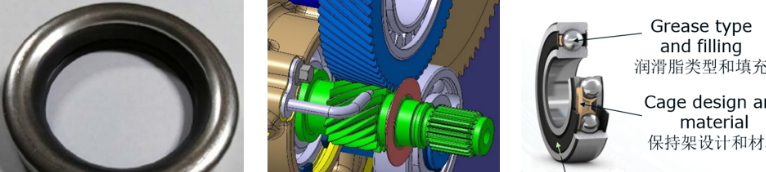
(4) ประสิทธิภาพสูง: ภายใต้เงื่อนไขของการตอบสนองความแข็งแรงและชีวิตเกียร์พื้นผิวฟันแข็งแบริ่งลูกบอล ฯลฯ ถูกนำมาใช้เพื่อลดการสูญเสียแรงเสียดทานของเกียร์และแบริ่ง น้ำมันหล่อลื่นความหนืดต่ำการหล่อลื่นจุดคงที่และมาตรการอื่น ๆ จะถูกนำมาใช้เพื่อลดการสูญเสียน้ำมันกวนและปรับปรุงประสิทธิภาพของการส่งกำลังไฟฟ้า 5) การประยุกต์ใช้เทคโนโลยีการเบรกแบบเสริมระบบอิเล็กทรอนิกส์อย่างกว้างขวาง: ระบบ ABS ที่ใช้กันอย่างแพร่หลายในรถโดยสารในประเทศจะค่อยๆได้รับการเลื่อนตำแหน่งให้กับอุตสาหกรรมรถบรรทุกและเทคโนโลยีรถยนต์โดยสารเช่น ESP และ EBD จะค่อยๆถูกนำไปใช้
2. บทนำเกี่ยวกับโครงสร้างของเพลาขับเคลื่อนไฟฟ้า
ภาพรวมของเพลาขับเคลื่อนไฟฟ้า: ด้วยข้อกำหนดของประเทศต่างๆเพื่อการป้องกันสิ่งแวดล้อมการอนุรักษ์พลังงานและการลดการปล่อยก๊าซเรือนกระจกและการปรับกลยุทธ์ของโครงสร้างพลังงานของประเทศโครงสร้างการใช้พลังงานของโลกมีแนวโน้มที่จะสะอาดคาร์บอนต่ำและหลากหลายซึ่งส่งเสริมแนวโน้มการใช้พลังงานไฟฟ้าของอุตสาหกรรมยานยนต์ นอกจากนี้ยังมีประเทศจำนวนมากที่วางแผนที่จะห้ามการขายยานพาหนะเชื้อเพลิงในระดับชาติส่งเสริมการพัฒนายานพาหนะพลังงานใหม่และเร่งการพัฒนาอุตสาหกรรมเช่นเพลาขับเคลื่อนไฟฟ้า
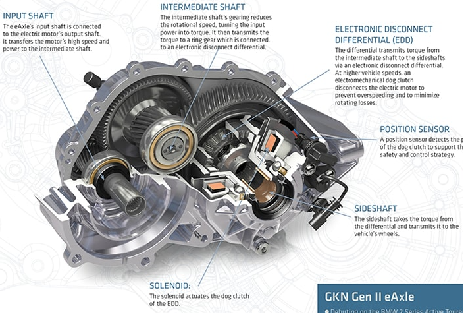
เพลาไฟฟ้าเป็นเพลาไดรฟ์ แต่หน่วยพลังงานถูกขับเคลื่อนด้วยเครื่องยนต์สันดาปภายในดั้งเดิมและปรับให้เข้ากับมอเตอร์ไดรฟ์และเพลาไฟฟ้าส่วนใหญ่รวมมอเตอร์เข้ากับเพลาเพื่อให้ได้การรวมประสิทธิภาพสูงและฟังก์ชั่นอื่น ๆ
3. แนวโน้มการพัฒนาของเพลาไดรฟ์ไฟฟ้า
ในช่วงไม่กี่ปีที่ผ่านมาด้วยความต้องการการปล่อยคาร์บอนที่เพิ่มขึ้นในประเทศต่างๆทั่วโลกรวมถึงการห้ามการขายยานพาหนะเชื้อเพลิงที่ออกในระดับชาติโดยเฉพาะอย่างยิ่งนโยบายสินเชื่อสองเท่าที่ออกโดยรัฐการพัฒนายานพาหนะพลังงานใหม่ได้เปลี่ยนจากการเติบโตของแรงผลักดัน
ในปัจจุบันเส้นทางทางเทคนิคของชุดเพลาไฟฟ้ากำลังบานเต็ม แต่บนพื้นฐานของความต้องการเพลาดั้งเดิมการพัฒนาโดยรวมอยู่ในด้านต่อไปนี้:
(1) ประสิทธิภาพและความหนาแน่นของพลังงานสูง: ในปัจจุบันความหนาแน่นพลังงานของแบตเตอรี่ออนบอร์ดต่ำมากเมื่อเทียบกับน้ำมันเบนซินส่งผลให้ยานพาหนะไฟฟ้าบริสุทธิ์บริสุทธิ์ไม่เพียงพอดังนั้นจึงจำเป็นต้องตระหนักถึงประสิทธิภาพและความหนาแน่นพลังงานของระบบขับเคลื่อนไฟฟ้า
ในแง่ของเทคโนโลยีมีการใช้มาตรการต่อไปนี้เป็นหลัก:
- คอนโทรลเลอร์ใช้แพลตฟอร์มแรงดันไฟฟ้าสูง IGBT ชิปการบัดกรีสองด้านและเทคโนโลยีระบบในแพคเกจรวมถึงเทคโนโลยีชิปคาร์ไบด์ทั้งหมดที่พัฒนาอย่างรวดเร็วซึ่งช่วยเพิ่มความหนาแน่นของพลังงานของคอนโทรลเลอร์
- มอเตอร์มีความเร็วสูงหลังจากความเร็วของมอเตอร์ไดรฟ์เพิ่มขึ้นแรงบิดออกปริมาณและน้ำหนักของมอเตอร์สามารถลดลงได้อย่างมีนัยสำคัญภายใต้พลังงานเดียวกันและกระแสการทำงานสามารถลดลงลดต้นทุนของคอนโทรลเลอร์และสายเคเบิลแรงดันสูงและผู้ผลิตในประเทศได้พัฒนามอเตอร์ความเร็วสูง ในขณะเดียวกันก็ใช้เทคโนโลยีลวดแบนและน้ำมันระบายความร้อนเพื่อปรับปรุงประสิทธิภาพของมอเตอร์

- เนื่องจากการเพิ่มขึ้นของความเร็วอินพุตมอเตอร์ตัวลดจำเป็นต้องใช้ซีลน้ำมันแรงเสียดทานต่ำแบริ่งลูกบอล ฯลฯ เพื่อลดการสูญเสียพลังงานที่เกิดจากแรงเสียดทาน
- คู่เกียร์เกียร์ใช้การหล่อลื่นแบบบังคับจุดคงที่การออกแบบกระทะน้ำมันแห้งและมาตรการอื่น ๆ เพื่อให้แน่ใจว่าระดับของเหลวจะลดลงและการสูญเสียพลังงานที่เกิดจากน้ำมันที่กวนของคู่เกียร์จะลดลงภายใต้เงื่อนไขของการหล่อลื่น
- ตัวลดมีหลายเกียร์เพิ่มจำนวนเกียร์และขยายช่วงการทำงานที่มีประสิทธิภาพสูงของมอเตอร์
(2) ประสิทธิภาพของ NVH สูง: เมื่อเทียบกับเสียงคำรามความถี่ต่ำและปานกลางที่ปล่อยออกมาจากการทำงานของยานพาหนะเชื้อเพลิงและเครื่องยนต์ครอบคลุมมันโมเดลรถยนต์ไฟฟ้าบริสุทธิ์ถูกครอบงำด้วยความถี่สูงที่น่าเบื่อหน่ายเนื่องจากแรงแม่เหล็กไฟฟ้าสูง ดังนั้นมาตรการต่อไปนี้ส่วนใหญ่จะใช้เพื่อเพิ่มประสิทธิภาพ NVH ของระบบไดรฟ์ไฟฟ้าในแง่ของเทคโนโลยี:
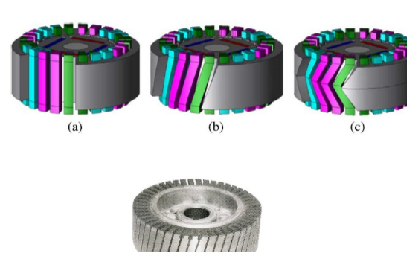
- มอเตอร์ไดรฟ์ปรับการออกแบบสล็อตโรเตอร์เพื่อลดความเข้มข้นของเสียงแม่เหล็กไฟฟ้าที่เกิดจากแรงแม่เหล็กไฟฟ้าและระลอกแรงบิดตามการกระจายตัวของรัศมี ปราบปรามฮาร์มอนิกของกระแสที่ใช้งานอยู่และลดความผันผวนของแรงบิดลำดับที่ 48 ที่เกิดจากมัน
- เพิ่มประสิทธิภาพกลยุทธ์การควบคุมความกว้างของ MCU พัลส์ (PWM) เพิ่มความถี่การสลับเพิ่มประสิทธิภาพของคลื่นเอาท์พุทและลดความผันผวนของแรงบิด
- การเพิ่มขึ้นของความเร็วในอินพุตนำไปสู่การเพิ่มความถี่ของคู่เกียร์และจำเป็นต้องเพิ่มจำนวนฟันเกียร์ปรับปรุงความแข็งของระบบและหลีกเลี่ยงการมีเพศสัมพันธ์กับความถี่ตามธรรมชาติของระบบเพื่อหลีกเลี่ยงการสั่นพ้อง
- ในแง่ของพารามิเตอร์ macroscopic การประยุกต์ใช้คู่เกียร์ที่มีโมดูลัสขนาดเล็กและความบังเอิญสูงสามารถลดความแข็งบนพื้นฐานของการรับรองความแข็งแรงของรากฟันและในเวลาเดียวกันพารามิเตอร์กล้องจุลทรรศน์สามารถปรับเปลี่ยนได้
- ปรับปรุงความแม่นยำในการจับคู่ของคู่การส่งสัญญาณบนพื้นฐานของการรับรองการหล่อลื่นและการเสียรูปความร้อนลดการกวาดล้างการจับคู่ของระบบส่งกำลังทั้งหมดและสามารถกำจัดเสียงเคาะของพื้นผิวฟัน;
- ระบบกันสะเทือนใช้เพื่อรองรับระบบส่งกำลัง (EPT) และมีบทบาทในการลดและควบคุมการส่งสัญญาณการสั่นสะเทือนทั้งหมดภายใต้หลักฐานของการสร้างความมั่นใจในความทนทานและความน่าเชื่อถือที่เหมาะสมและลดความแข็งของทิศทางหลัก
- เพิ่มแพ็คเกจอะคูสติก แต่เพิ่มค่าใช้จ่ายตามลำดับส่งผลกระทบต่อการกระจายความร้อนของระบบขับเคลื่อนไฟฟ้า
(3) บูรณาการ
ชุดประกอบไดรฟ์ไฟฟ้าแบบสามในหนึ่งครั้งที่รวมมอเตอร์ไดรฟ์ตัวควบคุมมอเตอร์และตัวลดเป็นเป้าหมายหลักทางเทคนิคของการพัฒนาในปัจจุบันในด้านของเพลาขับเคลื่อนไฟฟ้าและการพัฒนาในอนาคตจะถูกครอบงำโดยโครงสร้างแบบครบวงจรแบบบูรณาการอย่างลึกซึ้ง
บทสรุป
โดยทั่วไปทิศทางการพัฒนาในอนาคตของเพลาขับเคลื่อนไฟฟ้าคือ: เพื่อประสานความขัดแย้งระหว่างหลายเกียร์และการรวม; จากการใช้วัสดุใหม่โครงสร้างเพลาขับเคลื่อนไฟฟ้าได้รับการออกแบบมาเพื่อให้มีขนาดกะทัดรัดและมีน้ำหนักเบามากขึ้น การบูรณาการเพิ่มเติมของมอเตอร์ไฟฟ้าและเพลาขับเคลื่อนไฟฟ้า เมื่อพิจารณาถึงความฉลาดของเพลาขับเคลื่อนไฟฟ้าจากมุมมองของยานพาหนะทั้งหมดข้อมูลยานพาหนะนั้นเชื่อมต่อกันเพื่อปรับปรุงระดับความฉลาด ด้วยการพัฒนาอย่างรวดเร็วของปัญญาประดิษฐ์วิธีการเรียนรู้ของเครื่องจักรเช่นการเรียนรู้อย่างลึกซึ้งและการเรียนรู้การเสริมแรงถูกนำมาใช้เพื่อพัฒนากลยุทธ์การเปลี่ยนแปลงที่ชาญฉลาดมากขึ้นสำหรับประเภทและโครงสร้างที่แตกต่างกันของยานพาหนะไฟฟ้า
ฝากข้อความของคุณ
บล็อก

ตัวควบคุม "มัลติ-อิน-วัน": เจาะลึกการบูรณาการสำหรับรถยนต์พลังงานใหม่

The Core of Permanent Magnet Motors: A Complete Analysis of the Pros and Cons of Four Major PM Rotor Topologies – How to Correctly "Arrange Your Troops"

Deutsche EV-Fahrer: So gewinnen Sie bis zu 120 km Winterreichweite durch eine 0,1-mm-Einstellung zurück
